算法基础
快速排序
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 void quick_sort (int q[], int l, int r) if (l >= r) return ; int i = l - 1 , j = r + 1 ; int x = q[l + r >> 1 ]; while (i < j) { do ++i; while (q[i] < x); do --j; while (q[j] > x); if (i < j) swap (q[i], q[j]); } quick_sort (q, l, j); quick_sort (q, j + 1 , r); } void quickSort (int q[], int l, int r) if (l >= r) return ; int i = l - 1 , j = r + 1 ; int x = q[l + r >> 1 ]; while (i < j) { while (q[++i] < x); while (q[--j] > x); if (i < j) swap (q[i], q[j]); } quickSort (q, l, j); quickSort (q, j + 1 , r); }
快速选择
1 2 3 4 5 6 7 8 9 10 11 12 13 int quick_select (int q[], int l, int r, int k) if (l >= r) return q[l]; int i = l - 1 , j = r + 1 ; int x = q[l + r >> 1 ]; while (i < j) { while (q[++i] < x); while (q[--j] > x); if (i < j) swap (q[i], q[j]); } int n = j - l + 1 ; if (n >= k) return quick_select (q, l, j, k); return quick_select (q, j + 1 , r, k - n); }
归并排序
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 class Solution {public : vector<int > temp; vector<int > sortArray (vector<int >& nums) { temp.resize (nums.size ()); mergeSort (nums, 0 , nums.size () - 1 ); return nums; } void mergeSort (vector<int >&nums, int l, int r) if (l >= r) return ; int mid = l + r >> 1 ; mergeSort (nums, l, mid); mergeSort (nums, mid + 1 , r); int i = l, j = mid + 1 , k = l; while (i <= mid && j <= r) { if (nums[i] <= nums[j]) temp[k++] = nums[i++]; else temp[k++] = nums[j++]; } while (i <= mid) temp[k++] = nums[i++]; while (j <= r) temp[k++] = nums[j++]; for (int i = l; i <= r; ++i) nums[i] = temp[i]; } };
整数二分
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 bool check (int x) } int bsearch_1 (int l, int r) while (l < r) { int mid = l + r >> 1 ; if (check (mid)) r = mid; else l = mid + 1 ; } return l; } int bsearch_2 (int l, int r) while (l < r) { int mid = l + r + 1 >> 1 ; if (check (mid)) l = mid; else r = mid - 1 ; } return l; }
浮点数二分
1 2 3 4 5 6 7 8 9 10 11 12 13 14 bool check (double x) } double bsearch_3 (double l, double r) const double eps = 1e-6 ; while (r - l > eps) { double mid = (l + r) / 2 ; if (check (mid)) r = mid; else l = mid; } return l; }
高精度加法
vector存储数时,低位在头,高位在尾,这样有进位时push_back()效率高
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 vector<int > add (vector<int > &A, vector<int > &B) { if (A.size () < B.size ()) return add (B, A); vector<int > C; int t = 0 ; for (int i = 0 ; i < A.size (); i++) { t += A[i]; if (i < B.size ()) t += B[i]; C.push_back (t % 10 ); t /= 10 ; } if (t) C.push_back (t); return C; }
高精度减法
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 vector<int > sub (vector<int > &A, vector<int > &B) { vector<int > C; for (int i = 0 , t = 0 ; i < A.size (); i++) { t = A[i] - t; if (i < B.size ()) t -= B[i]; C.push_back ((t + 10 ) % 10 ); if (t < 0 ) t = 1 ; else t = 0 ; } while (C.size () > 1 && C.back () == 0 ) C.pop_back (); return C; }
高精度*低精度
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 vector<int > mul (vector<int > &A, int b) { vector<int > C; int t = 0 ; for (int i = 0 ; i < A.size () || t; i++) { if (i < A.size ()) t += A[i] * b; C.push_back (t % 10 ); t /= 10 ; } while (C.size () > 1 && C.back () == 0 ) C.pop_back (); return C; }
高精度/低精度
1 2 3 4 5 6 7 8 9 10 11 12 13 vector<int > div (vector<int > &A, int b, int &r) { vector<int > C; r = 0 ; for (int i = A.size () - 1 ; i >= 0 ; i--) { r = r * 10 + A[i]; C.push_back (r / b); r %= b; } reverse (C.begin (), C.end ()); while (C.size () > 1 && C.back () == 0 ) C.pop_back (); return C; }
一维前缀和
1 2 3 S[i] = a[1 ] + a[2 ] + ... a[i] a[l] + ... + a[r] = S[r] - S[l - 1 ]
二维前缀和
1 2 3 S[i, j] = 第i行j列格子左上部分所有元素的和 以(x1, y1)为左上角,(x2, y2)为右下角的子矩阵的和为: S[x2, y2] - S[x1 - 1 , y2] - S[x2, y1 - 1 ] + S[x1 - 1 , y1 - 1 ]
一维差分
1 2 3 4 5 void insert (int l,int r,int c) B[l] += c; B[r + 1 ] -= c; }
二维差分
1 2 3 4 5 6 void insert (int x1, int y1, int x2, int y2, int c) b[x1][y1] += c; b[x1][y2 + 1 ] -= c; b[x2 + 1 ][y1] -= c; b[x2 + 1 ][y2 + 1 ] += c;
位运算
1 2 求n的第k位数字: n >> k & 1 返回n的最后一位1 :lowbit (n) = n & -n
双指针
1 2 3 4 5 6 7 8 9 10 for (int i = 0 , j = 0 ; i < n; i ++ ){ while (j <= i && check (i, j)) j ++ ; } 寻找单调性 常见问题分类: (1 ) 对于一个序列,用两个指针维护一段区间 (2 ) 对于两个序列,维护某种次序,比如归并排序中合并两个有序序列的操作
离散化
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 vector<int > alls; sort (alls.begin (), alls.end ()); alls.erase (unique (alls.begin (), alls.end ()), alls.end ()); int find (int x) int l = 0 , r = alls.size () - 1 ; while (l < r) { int mid = l + r >> 1 ; if (alls[mid] >= x) r = mid; else l = mid + 1 ; } return r + 1 ; }
区间合并
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 using PII = pair<int , int >;void mergeSegs (vector<PII> &segs) sort (segs.begin (), segs.end ()); vector<PII> ans; int l = -2e9 , r = -2e9 ; for (auto seg : segs) { if (r < seg.first) { if (l != -2e9 ) ans.push_back ({l, r}); l = seg.first; } r = max (r, seg.second); } if (l != -2e9 ) ans.push_back ({l, r}); segs = ans; }
数据结构
单链表
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 int head, e[N], ne[N], idx;void init () head = -1 ; idx = 0 ; } void insertHead (int x) void insertAfter (int k, int x) if (k == 0 ) { e[idx] = x, ne[idx] = head, head = idx++; } e[idx] = x, ne[idx] = ne[k], ne[k] = idx++; } void removeAfter (int k) if (k == 0 ) { head = ne[head]; } ne[k] = ne[ne[k]]; }
双链表
1 2 3 4 5 6 7 8 9 10 11 12 13 14 int e[N], l[N], r[N], idx; void init () r[0 ] = 1 , l[1 ] = 0 ; idx = 2 ; } void insertAfter (int k, int x) e[idx] = x, l[idx] = k, r[idx] = r[k]; r[k] = idx, l[r[idx]] = idx; ++idx; } void removeK (int k) l[r[k]] = l[k]; r[l[k]] = r[k]; }
栈
1 2 3 4 5 int stk[N], tt = 0 ; void push (int x) void pop () int top () return stk[tt]; }bool empty () return tt == 0 ; }
队列
1 2 3 4 5 int q[N], hh = 0 , tt = -1 ; void push () void pop () void front () return q[hh]; }bool empty () return hh > tt; }
循环队列
1 2 3 4 5 6 7 8 9 10 11 int q[N], hh = 0 , tt = 0 ;void push (int x) q[tt++] = x; if (tt == N) tt = 0 ; } void pop () hh++; if (hh == N) hh = 0 ; } int front () return q[hh]; }bool empty () return hh == tt; }
单调栈
常见模型:找出每个数左边离它最近的比它大/小的数
1 2 3 4 5 int tt = 0 ; for (int i = 1 ; i <= n; ++i) { while (tt&&check (stk[tt],data[i])--tt; stk[++tt]=i; }
单调队列
1 2 3 4 5 6 int hh = 0 , tt = -1 ;for (int i = 0 ; i < n; ++i) { while (hh <= tt && check_out (q[hh])) ++hh; while (hh <= tt && check (q[tt], data[i])) --tt; q[++tt] = i; }
KMP
s是长文本串,长度为n,范围[1,2,3…n]
p是模式串,长度为m,范围[1,2,3…m]
s,p都是从下标1开始存储的!
ne[1]=0
next[j] 表示所有 p[1~j] 的相等的前缀和后最中长度的最大值
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 for (int i = 2 , j = 0 ; i <= m; ++i) { while (j && p[i] != p[j + 1 ]) j = ne[j]; if (p[i] == p[j + 1 ]) ++j; ne[i] = j; } for (int i = 1 , j = 0 ; i <= n; ++i) { while (j && s[i] != p[j + 1 ]) j = ne[j]; if (s[i] == p[j + 1 ]) ++j; if (j == m) { j = ne[j]; } }
Trie 字典树
0号点既是根节点,又是空节点
son[ i ][ x ]存储字典树中当前节点 i 的值为x的子节点的位置
cnt[ i ]存储以当前节点 i 结尾的单词数量
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 int son[N][26 ], cnt[N], idx;void insert (string &str) int p = 0 ; for (int i = 0 ; i < str.size (); ++i) { int u = str[i] - 'a' ; if (son[p][u] == 0 ) son[p][u] = ++idx; p = son[p][u]; } ++cnt[p]; } int query (string &str) int p = 0 ; for (int i = 0 ; i < str.size (); ++i) { int u = str[i] - 'a' ; if (son[p][u] == 0 ) return 0 ; p = son[p][u]; } return cnt[p]; }
并查集
朴素并查集
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 int fa[N]; void init () for (int i = 1 ; i <= n; ++i) fa[i] = i; } int find (int x) if (fa[x] == x) return x; return fa[x] = find (fa[x]); } bool merge (int x, int y) int rootx = find (x), rooty = find (y); if (rootx == rooty) return false ; fa[rootx] = rooty; return true ; } - 维护size的边带权并查集 ```CPP int fa[N], d[N], size[N]; void init () for (int i = 1 ; i <= n; ++i) { fa[i] = i; d[i] = 0 ; size[i] = 1 ; } } int find (int x) if (fa[x] == x) return x; int root = find (fa[x]); d[x] += d[fa[x]]; return fa[x] = root; } bool merge (int x, int y) x = find (x), y = find (y); if (x == y) return false ; fa[x] = y; d[x] = newDist; size[y] += size[x]; return true ; }
堆
h[N]存储堆中的值,范围:[1,2,3,…,n],从1开始存储,h[1]:堆顶
节点u :
ph[k]:存储第k个插入的点在堆heap中的位置
hp[k]:存储堆heap中下标为k的位置处的节点是第几个插入的
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 int h[N], ph[N], hp[N], idx;void heapSwap (int a, int b) swap (ph[hp[a]], ph[hp[b]]); swap (hp[a], hp[b]); swap (h[a], h[b]); } void up (int u) while (u / 2 && h[u] < h[u / 2 ]) { heapSwap (u, u / 2 ); u /= 2 ; } } void down (int u) int t = u; if (2 * u <= idx && h[t] > h[2 * u]) t = 2 * u; if (2 * u + 1 <= idx && h[t] > h[2 * u + 1 ]) t = 2 * u + 1 ; if (t != u) { heapSwap (t, u); down (t); } } void buildHeap () for (int i = n / 2 ; i; i--) down (i); }
一般哈希
拉链法
1 2 3 4 5 6 7 8 9 10 11 12 13 14 int h[N], e[N], ne[N], idx;void insert (int x) int k = (x % N + N) % N; e[idx] = x; ne[idx] = h[k]; h[k] = idx++; } bool find (int x) int k = (x % N + N) % N; for (int i = h[k]; ~i; i = ne[i]) { if (e[i] == x) return true ; } return false ; }
开放寻址法
1 2 3 4 5 6 7 8 9 10 11 const int null = 0x3f3f3f3f ;int h[N];int find (int x) int t = (x % N + N) % N; while (h[t] != null && h[t] != x) { ++t; if (t == N) t = 0 ; } return t; } void init () memset (h, 0x3f , sizeof
字符串前缀哈希
核心思想:将字符串看成P进制数,P的经验值是 131或 13331,取这两个值的冲突概率低
小技巧:取模的数用 2^64,这样直接用 unsigned long long存储,溢出的结果就是取模的结果
h[0]=0,h[k]表示串长为k的前缀子串的哈希值,前缀和思想
p[k]表示p^k mod 2^64
1 2 3 4 5 6 7 8 9 10 11 using ULL = unsigned long long ;const int P = 131 ;ULL h[N], p[N]; void init () p[0 ] = 1 ; for (int i = 1 ; i <= n; ++i) { p[i] = p[i - 1 ] * P; h[i] = h[i - 1 ] * P + str[i]; } } ULL hashsubstr (int l, int r) { return h[r] - h[l - 1 ] * p[r - l + 1 ]; }
C++ 常用STL
vector, 变长数组,倍增的思想
1 2 3 4 5 6 7 8 size() 返回元素个数 empty() 返回是否为空 clear() 清空 front()/back() push_back()/pop_back() begin()/end() [] 支持比较运算,按字典序
pair<int, int>
1 2 3 first, 第一个元素 second, 第二个元素 支持比较运算,以first为第一关键字,以second为第二关键字(字典序)
string,字符串
1 2 3 4 5 size()/length() 返回字符串长度 empty() clear() substr(起始下标,(子串长度)) 返回子串 c_str() 返回字符串所在字符数组的起始地址
queue, 队列
1 2 3 4 5 6 size() empty() push() 向队尾插入一个元素 front() 返回队头元素 back() 返回队尾元素 pop() 弹出队头元素
priority_queue, 优先队列,默认是大根堆
1 2 3 4 5 6 size ()empty ()push () 插入一个元素top () 返回堆顶元素pop () 弹出堆顶元素定义成小根堆的方式:priority_queue<int ,vector<int >, greater<int >> q;
stack, 栈
1 2 3 4 5 size() empty() push() 向栈顶插入一个元素 top() 返回栈顶元素 pop() 弹出栈顶元素
deque, 双端队列
1 2 3 4 5 6 7 8 size() empty() clear() front()/back() push_back()/pop_back() push_front()/pop_front() begin()/end() []
1 2 3 4 5 6 7 8 + set, map, multiset, multimap, 基于平衡二叉树(红黑树),动态维护有序序列 ```cpp size() empty() clear() begin()/end() ++, -- 返回前驱和后继,时间复杂度 O(logn)
1 2 3 4 5 size ()empty ()clear ()begin ()/end ()++, -- 返回前驱和后继,时间复杂度 O (logn)
1 2 3 4 5 size ()empty ()clear ()begin ()/end ()++, -- 返回前驱和后继,时间复杂度 O (logn)
set/multiset1 2 3 4 5 6 7 8 9 insert() 插入一个数 find() 查找一个数 count() 返回某一个数的个数 erase() (1) 输入是一个数x,删除所有x O(k + logn) (2) 输入一个迭代器,删除这个迭代器 lower_bound()/upper_bound() lower_bound(x) 返回大于等于x的最小的数的迭代器 upper_bound(x) 返回大于x的最小的数的迭代器
map/multimap1 2 3 4 5 insert() 插入的数是一个pair erase() 输入的参数是pair或者迭代器 find() [] 注意multimap不支持此操作。 时间复杂度是 O(logn) lower_bound()/upper_bound()
unordered_set, unordered_map, unordered_multiset, unordered_multimap, 哈希表
1 2 和上面类似,增删改查的时间复杂度是 O(1) 不支持 lower_bound()/upper_bound(), 迭代器的++,--
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 bitset<10000> s; ~, &, |, ^ >>, << ==, != [] count() 返回有多少个1 any() 判断是否至少有一个1 none() 判断是否全为0 set() 把所有位置成1 set(k, v) 将第k位变成v reset() 把所有位变成0 flip() 等价于~ flip(k) 把第k位取反
搜索与图论
数与图的存储
数与图的遍历
DFS,深度优先遍历,递归
1 2 3 4 5 6 7 8 9 int dfs (int u) visited[u] = true ; for (int i = h[u]; ~i; i = ne[i]){ int j = e[i]; if (visited[j]==false ) { dfs (j); } } }
BFS,广度优先遍历,队列辅助
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 int bfs (int u) queue<int > q; visited[u] = true ; q.push (u); while (q.size ()) { auto t = q.front (); q.pop (); for (int i = h[t]; ~i; i = ne[i]) { int j = e[i]; if (visited[j] == false ) { dis[j] = dis[t] + 1 ; prev[j] = t; visited[j] = true ; q.push (j); } } } }
BFS状态转移
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 unordered_map<string, int > d; unordered_map<string, bool > visited; string start, endstr = "12345678x" ; bool bfs (string start) queue<string> q; visited[start] = true ; d[start] = 0 ; q.push (start); while (q.size ()) { auto u = q.front (); q.pop (); if (u == endstr) return true ; int k = u.find ('x' ); int ux = k / 3 , uy = k % 3 ; for (int i = 0 ; i < 4 ; ++i) { int vx = ux + dx[i], vy = uy + dy[i]; if (vx >= 0 && vx < 3 && vy >= 0 && vy < 3 ) { string v = u; swap (v[k], v[vx * 3 + vy]); if (visited[v] == false ) { d[v] = d[u] + 1 ; visited[v] = true ; q.push (v); } } } } return false ; }
拓扑排序
BFS队列入度拓扑排序
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 vector<int > findOrder (int numCourses, vector<vector<int >>& prerequisites) { vector<int > ans; vector<int > indeg (numCourses) ; for (auto p : prerequisites) ++indeg[p[0 ]]; vector<vector<int >> g (numCourses); for (auto p : prerequisites) g[p[1 ]].push_back (p[0 ]); queue<int > q; for (int i = 0 ; i < numCourses; ++i) { if (indeg[i] == 0 ) q.push (i); } while (q.size ()) { auto now = q.front (); q.pop (); ans.push_back (now); for (auto nxt : g[now]) { if (--indeg[nxt]== 0 ) q.push (nxt); } } if (ans.size () != numCourses) return {}; return ans; }
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 bool topoSort_bfs () for (int i = 1 ; i <= n; ++i) if (indeg[i] == 0 ) q.push (i); vector<int > ans; while (q.size ()) { auto u = q.front (); q.pop (); ans.push_back (u); for (auto v : g[u]) { if (--indeg[v] == 0 ) { q.push (v); } } } if (ans.size () == n) { for (int i = 0 ; i < ans.size (); ++i) { cout << ans[i] << " " ; } return true ; } else { cout << "不能拓扑排序" ; return false ; } }
DFS拓扑排序
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 class Solution {public : vector<int > ans; vector<vector<int >> g; vector<int > vis; vector<int > findOrder (int n, vector<vector<int >>& prerequisites) { g = vector<vector<int >>(n); for (auto p : prerequisites) g[p[1 ]].push_back (p[0 ]); vis = vector<int >(n); for (int i = 0 ; i < n; ++i) { if (vis[i] == 0 ) { if (dfs (i) == false ) return {}; } } reverse (ans.begin (), ans.end ()); return ans; } bool dfs (int u) vis[u] = 1 ; for (auto v : g[u]) { if (vis[v] == 0 ) { if (dfs (v) == false ) return false ; } if (vis[v] == 1 ) return false ; } vis[u] = 2 ; ans.push_back (u); return true ; } };
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 enum statu {0 , visiting = 1 , visited = 2 };statu st[N]; int stk[N], tt;bool topodfs (int u) st[u] = 1 ; for (int i = h[u]; ~i; i = ne[i]) { int j = e[i]; if (st[j] == 0 ) { if (topodfs (j) == false ) { return false ; } } else if (st[j] == 1 ) { return false ; } } st[u] = 2 ; stk[++tt] = u; return true ; } bool topoSort () for (int i = 1 ; i <= n; ++i) { if (st[i] == 0 ) { if (topodfs (i) == false ) { cout << "不能拓扑排序" << endl; return false ; } } } return true ; }
单源最短路
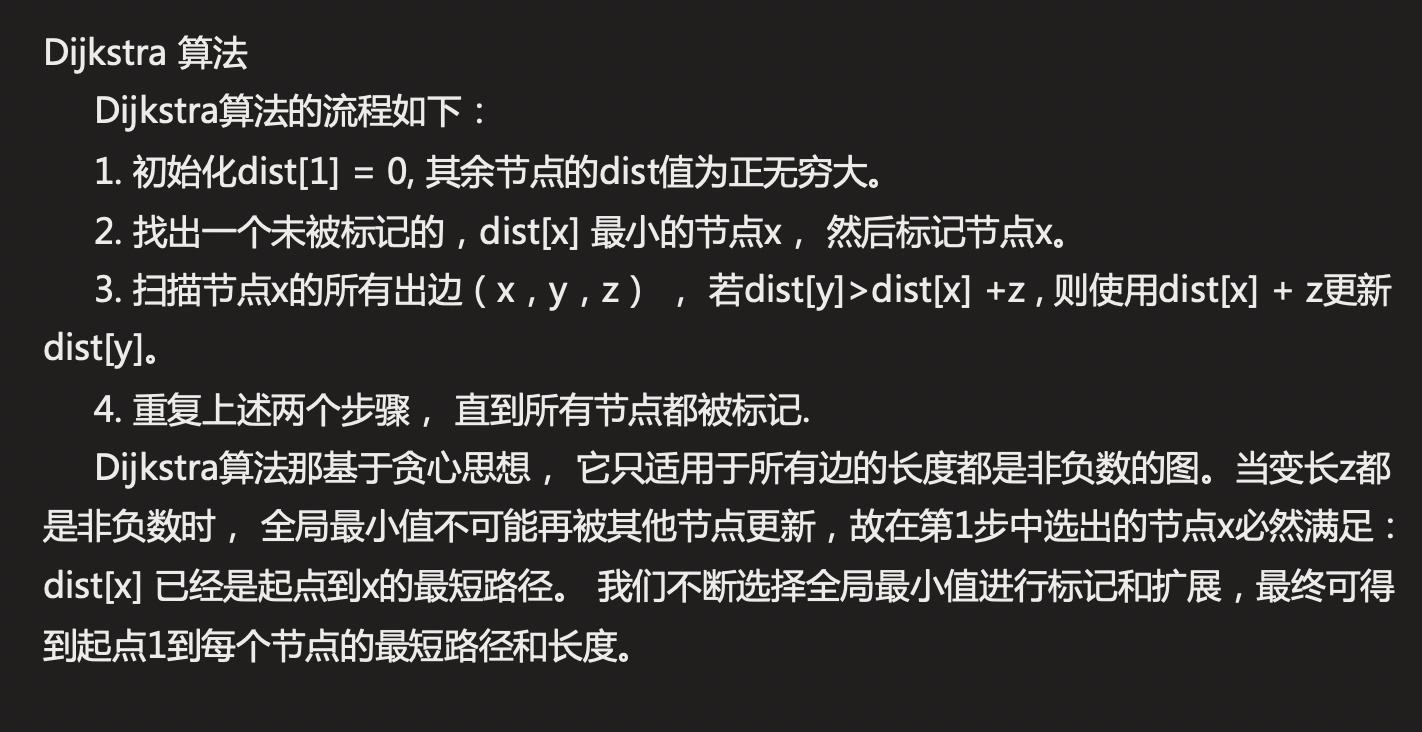
朴素Dijkstra算法
堆优化版的Dijkstra算法
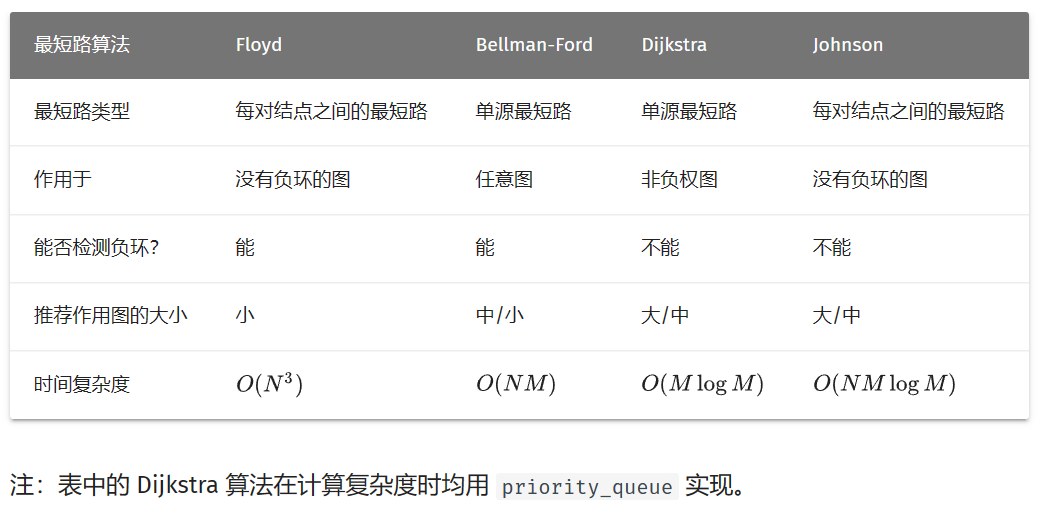
Bellman-Ford
O ( V E ) O(VE) O ( V E ) O ( m n ) O(mn) O ( mn ) 如果存在负权环路,最短路可能不存在
若最短路不存在时,只能用来判断是否存在负环
如果第n次操作仍可以更新,则存在负环
需要注意的是,以S点为源点跑 Bellman-Ford 算法时,如果没有给出存在负环的结果,只能说明从S点出发不能抵达一个负环,而不能说明图上不存在负环。因此如果需要判断整个图上是否存在负环,最严谨的做法是建立一个超级源点,向图上每个节点连一条权值为 0 的边,然后以超级源点为起点执行 Bellman-Ford 算法。
1 2 3 4 dist[1]=0,dist[其他点]=+∞ for n 次 (迭代k次涵义:从1号点经过不超过k条边的最短距离) for 所有边 a->b w dist[b]=min(dist[b],dist[a]+w) 松弛操作
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 struct Edge { int a, b, w; } edge[M]; void add (i, a, b, c) bool bellmanford (int u, int k) memset (dist, 0x3f , sizeof dist); dist[u] = 0 ; for (int i = 0 ; i < k; ++i) { memcpy (backup, dist, sizeof dist); for (int j = 0 ; j < m; ++j) { auto e = edge[j]; dist[e.b] = min (dist[e.b], backup[e.a] + e.w); } } if (dist[n] > 0x3f3f3f3f / 2 ) return false ; return true ; }
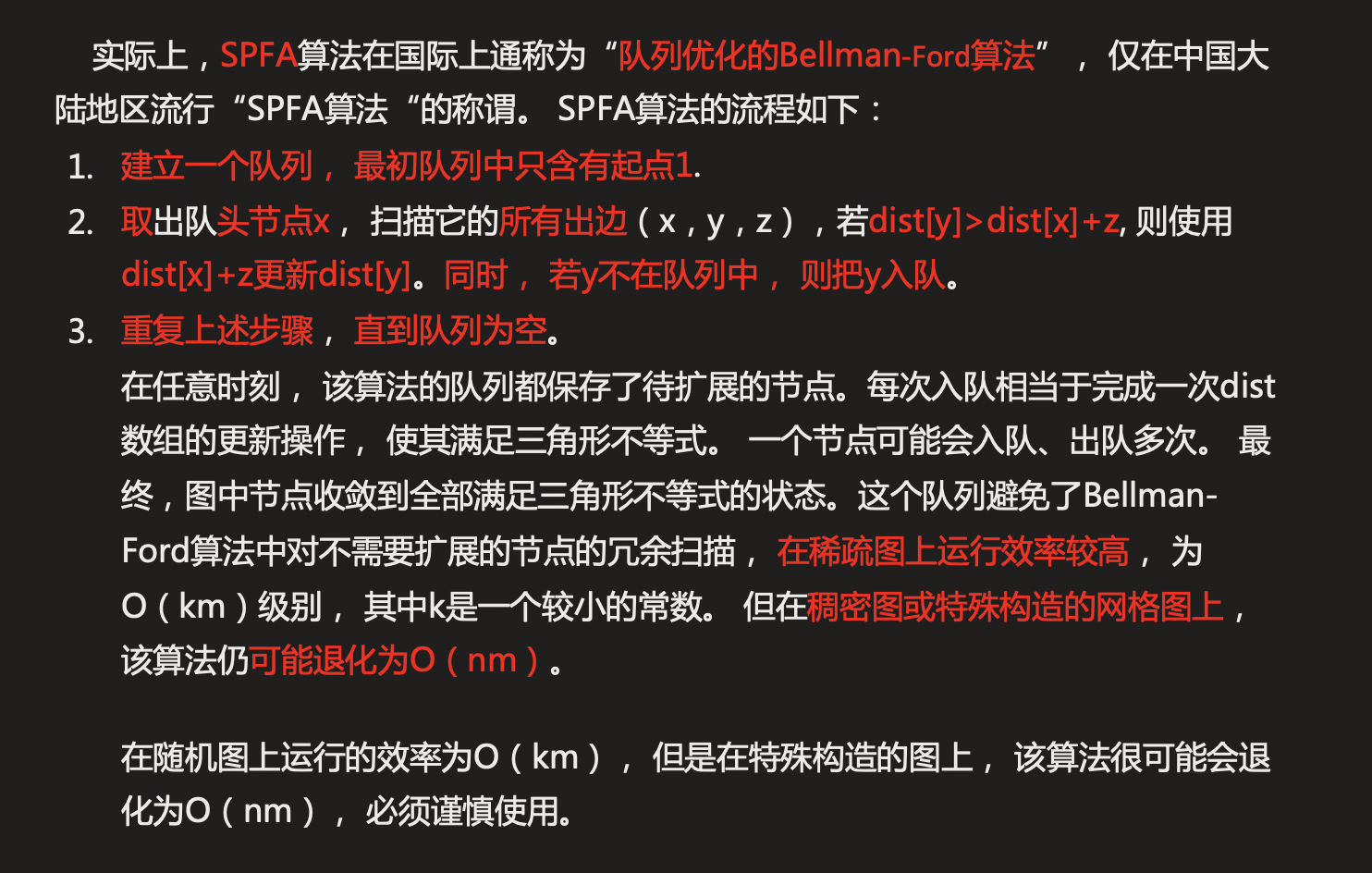
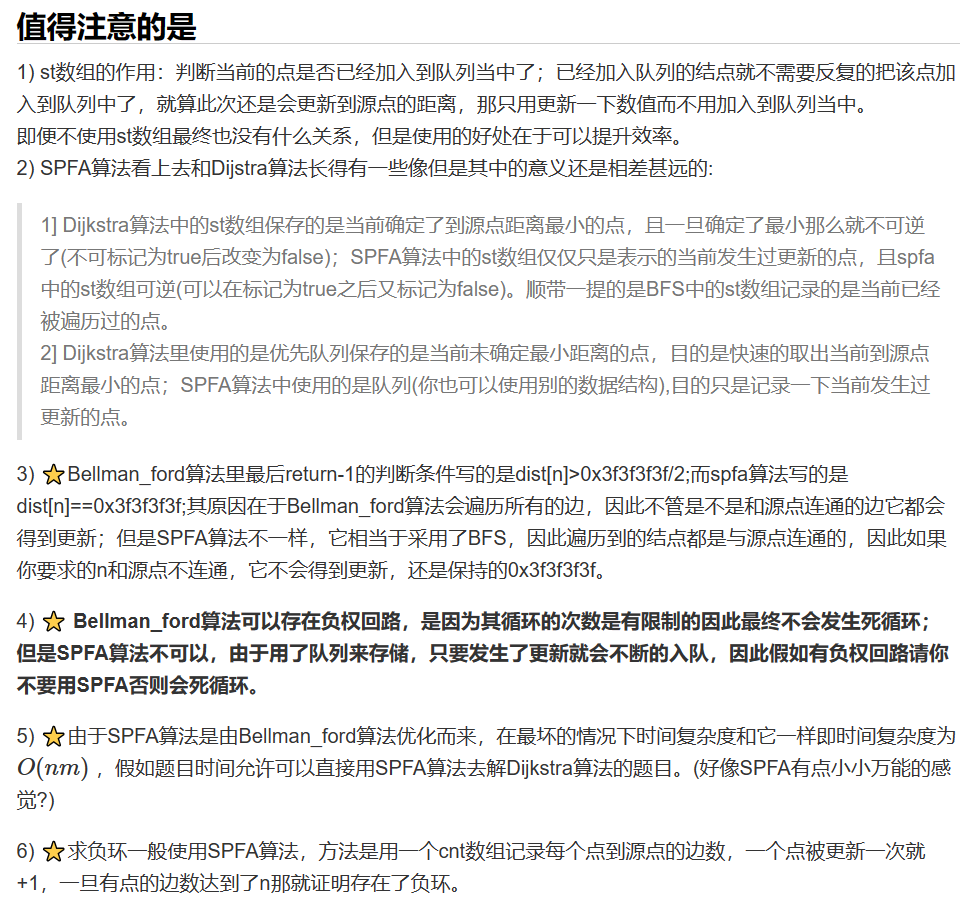
SPFA (Bellman-Ford队列优化版本)
一般 O ( E ) O(E) O ( E ) O ( m ) O(m) O ( m )
最坏 O ( V E ) O(VE) O ( V E ) O ( m n ) O(mn) O ( mn )
图中不可以含有负权环路
Shortest Path Faster Algorithm
1 2 3 4 5 6 优化思路,当dist[a]变小时才需要更新dist[b] 借助队列来实现,队列存储更新过变小的点。(队列元素不要重复存储,入队出队时更新维护状态变量) dist[x]表示1->x的最短距离 cnt[x]表示最短路径上的边数 cnt[x]>=n,表示至少经过了n条边,则至少经过了n+1个点,故肯定有负权环路
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 bool spfa (int u) memset (dist, 0x3f , sizeof dist); queue<int > q; dist[u] = 0 ; q.push (u); st[u] = true ; while (q.size ()) { auto v = q.front (); q.pop (); st[v] = false ; for (int i = h[v]; ~i; i = ne[i]) { int j = e[i], weight = w[i]; if (dist[j] > dist[v] + weight) { dist[j] = dist[v] + weight; if (st[j] == false ) { q.push (j); st[j] = true ; } } } } if (dist[n] == 0x3f3f3f3f ) return false ; return true ; }
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 bool spfaNegaCycle () queue<int > q; for (int i = 1 ; i <= n; ++i) { q.push (i); st[i] = true ; } while (q.size ()) { auto v = q.front (); q.pop (); st[v] = false ; for (int i = h[v]; ~i; i = ne[i]) { int j = e[i], weight = w[i]; if (dist[j] > dist[v] + weight) { dist[j] = dist[v] + weight; cnt[j] = cnt[v] + 1 ; if (cnt[j] >= n) return true ; if (st[j] == false ) { q.push (j); st[j] = true ; } } } } return false ; }
多源最短路
Floyd算法
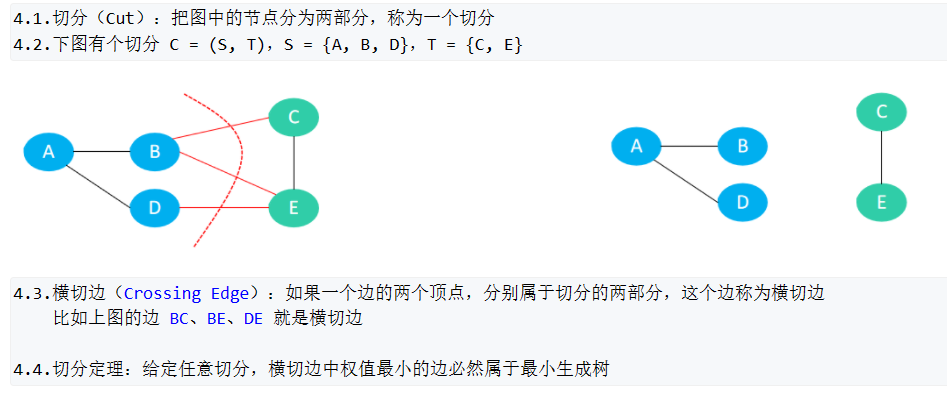
最小生成树
B站优质讲解
普利姆算法Prim
朴素版Prim
1 2 3 4 5 6 dist[i]<-∞ 集合S={当前已经在连通块中的所有点} for(i=0;i<n;++i) v<-找到集合外距离最近的点 用v更新其它点到_集合_的距离(Dijkstra算法为到源点距离) st[v]=true,将点v加入到集合
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 bool prim () memset (dist, 0x3f , sizeof dist); for (int i = 0 ; i < n; ++i) { int t = -1 ; for (int j = 1 ; j <= n; ++j) { if (st[j] == false && (t == -1 || dist[t] > dist[j])) { t = j; } } if (i && dist[t] == INF) return false ; if (i) res += dist[t]; st[t] = true ; for (int j = 1 ; j <= n; ++j) { dist[j] = min (dist[j], g[t][j]); } } return true ; }
堆优化版Prim
不常用
O ( m l o g n ) O(mlogn) O ( m l o g n )
克鲁斯卡尔算法Kruskal
稀疏图适用
O ( m l o g m ) O(mlogm) O ( m l o g m )
1 2 3 4 将所有边按权重从小到大排序 枚举每条边a->b,权重w if a,b不连通 将这条边加入集合
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 struct Edge { int a, b, w; bool operator <(const Edge &e) const { return w < e.w; } } edge[M]; bool kruskal () sort (edge, edge + idx); for (int i = 1 ; i <= n; ++i) p[i] = i; for (int i = 0 ; i < idx; ++i) { int a = edge[i].a, b = edge[i].b, w = edge[i].w; int pa = findroot (a), pb = findroot (b); if (pa != pb) { p[pa] = pb; res += w; ++cnt; if (cnt == n - 1 ) break ; } } if (cnt < n - 1 ) return false ; return true ; }
二分图
染色法
DFS版染色法
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 class Solution {public : vector<int > color; bool isBipartite (vector<vector<int >>& graph) int n = graph.size (); color.resize (n); for (int i = 0 ; i < n; ++i) { if (color[i] == 0 ) { if (dfs (graph, i, 1 ) == false ) return false ; } } return true ; } bool dfs (vector<vector<int >>& graph, int u, int c) color[u] = c; for (auto v : graph[u]) { if (color[v] == 0 ) if (dfs (graph, v, 3 - c) == false ) return false ; if (color[v] == c) return false ; } return true ; } };
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 bool dfs (int u, int c) color[u] = c; for (int i = h[u]; ~i; i = ne[i]) { int j = e[i]; if (color[j] == 0 ) { if (dfs (j, 3 - c) == false ) return false ; } if (color[j] == c) return false ; } return true ; } bool isBipartite () for (int i = 1 ; i <= n; ++i) { if (color[i] == 0 ) { if (dfs (i, 1 ) == false ) return false ; } } return true ; }
BFS版染色法
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 bool bfs (int u) queue<int > q; color[u] = 1 ; q.push (u); while (q.size ()) { auto t = q.front (); q.pop (); for (int i = h[t]; ~i; i = ne[i]) { int j = e[i]; if (color[j] == 0 ) { color[j] = 3 - color[t]; q.push (j); } if (color[j] == color[t]) return false ; } } return true ; } bool isBipartite () for (int i = 1 ; i <= n; ++i) { if (color[i] == 0 ) { if (bfs (i) == false ) { return false ; } } } return true ; }
匈牙利算法
最坏 O ( m n ) O(mn) O ( mn ) O ( m n ) O(mn) O ( mn )
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 bool findmatch (int u) for (int i = h[u]; ~i; i = ne[i]) { int j = e[i]; if (st[j] == false ) { st[j] = true ; if (match[j] == 0 || findmatch (match[j])) { match[j] = u; return true ; } } } return false ; } int Maxmatch () int cnt = 0 ; for (int i = 1 ; i <= n1; ++i) { memset (st, 0 , sizeof st); if (findmatch (i)) { ++cnt; } } return cnt; }
数学知识
位运算
按位异或
归零率 a ⊕ a = 0 a\oplus a=0 a ⊕ a = 0 恒等率 a ⊕ 0 = a a\oplus0=a a ⊕ 0 = a a ⊕ 1 = ∼ a a\oplus1=\sim a a ⊕ 1 =∼ a
质数(素数)Prime
定义:质数又称素数 。一个大于1的自然数,除了1和它自身外,不能被其他自然数整除的数叫做质数;否则称为合数 (规定1既不是质数也不是合数)
质数的判定——试除法
分解质因数——试除法
算数基本定理 :任何一个大于1的自然数N,如果N不为质数,那么N可以唯一 分解成有限个质数的乘积。
N = P 1 a 1 P 2 a 2 P 3 a 3 . . . P n a n N=P_1^{a_1}P_2^{a_2}P_3^{a_3}...P_n^{a_n} N = P 1 a 1 P 2 a 2 P 3 a 3 ... P n a n P 1 < P 2 < P 3 < . . . < P n P_1<P_2<P_3<...<P_n P 1 < P 2 < P 3 < ... < P n a i a_i a i
这样的分解称为N 的标准分解式。
一个大于1的正整数 N N N N = P 1 a 1 P 2 a 2 . . . P n a n N=P_1^{a_1}P_2^{a_2}...P_n^{a_n} N = P 1 a 1 P 2 a 2 ... P n a n
正因数个数为:
σ 0 ( N ) = ( 1 + a 1 ) ( 1 + a 2 ) ( 1 + a 3 ) . . . ( 1 + a n ) \sigma_0(N)=(1+a_1)(1+a_2)(1+a_3)...(1+a_n) σ 0 ( N ) = ( 1 + a 1 ) ( 1 + a 2 ) ( 1 + a 3 ) ... ( 1 + a n )
正因数之和为: σ 1 ( N ) = ( 1 + p 1 + p 1 2 + . . . + p 1 a 1 ) ( 1 + p 2 + p 2 2 + . . . + p 2 a 2 ) . . . ( 1 + p n + p n 2 + . . . + p n a n ) \sigma_1(N)=(1+p_1+p_1^2+...+p_1^{a_1})(1+p_2+p_2^2+...+p_2^{a_2})...(1+p_n+p_n^2+...+p_n^{a_n}) σ 1 ( N ) = ( 1 + p 1 + p 1 2 + ... + p 1 a 1 ) ( 1 + p 2 + p 2 2 + ... + p 2 a 2 ) ... ( 1 + p n + p n 2 + ... + p n a n )
当 σ 1 = 2 N \sigma_1=2N σ 1 = 2 N N 为完全数。
整数a,b的最大公因子 ( a , b ) (a,b) ( a , b ) [ a , b ] [a,b] [ a , b ] a b = ( a , b ) × [ a , b ] ab=(a,b)\times[a,b] ab = ( a , b ) × [ a , b ]
1 2 3 4 5 6 7 8 9 10 unordered_map<int ,int > prime; void divide (int n) for (int i=2 ;i<=n/i;++i){ while (n%i==0 ){ ++prime[i]; n/=i; } } if (n>1 ) ++prime[n]; }
一个合数分解而成的质因数最多只包含一个大于 s q r t ( n ) sqrt(n) s q r t ( n )
当枚举到一个数 i i i n n n [ 2 , i − 1 ] [2,i-1] [ 2 , i − 1 ] n % i = = 0 n\%i==0 n % i == 0 i i i [ 2 , i − 1 ] [2,i-1] [ 2 , i − 1 ] 质数
两个没有共同质因子的正整数称为互质 。因为 1 1 1 1 1 1 1 1 1 只有一个质因子的正整数也即质数。
筛质数(朴素筛法)
步骤:把 [ 2 , n − 1 ] [2,n-1] [ 2 , n − 1 ]
原理:假定有一个数 p p p [ 2 , p − 1 ] [2,p-1] [ 2 , p − 1 ] [ 2 , p − 1 ] [2,p-1] [ 2 , p − 1 ] p p p [ 2 , p − 1 ] [2,p-1] [ 2 , p − 1 ] p p p p p p
O ( n l o g n ) O(nlogn) O ( n l o g n )
1 2 3 4 5 6 7 8 9 10 11 12 bool notprime[N];int prime[N],cnt;int getPrime (int n) for (int i=2 ;i<=n;++i){ if (notprime[i]==false ){ prime[cnt++]=i; } for (int j=2 *i;j<=n;j+=i){ notprime[j]=true ; } } }
埃式筛法(稍加优化版的朴素筛法)
质数定理:1 ∼ n 1\sim n 1 ∼ n n ln n n\over \ln n l n n n
步骤:在朴素筛法的过程中只用质数项 去筛
O ( n l o g ( l o g n ) ) O(nlog(logn)) O ( n l o g ( l o g n ))
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 bool composite[N];int prime[N],cnt;void getPrime (int n) for (int i=2 ;i<=n;++i){ if (composite[i]==false ){ prime[cnt++]=i; if (i<=n/i){ for (int j=i*i;j<=n;j+=i){ composite[j]=true ; } } } } }
线性筛法
若 n ≈ 1 0 6 n\approx10^6 n ≈ 1 0 6 n ≈ 1 0 7 n\approx10^7 n ≈ 1 0 7
核心: 1 ∼ n 1\sim n 1 ∼ n p p p 最小质因子 筛掉
原理: 1 ∼ n 1\sim n 1 ∼ n 最小质因子 来筛,然后每一个数都只有一个最小质因子,因此每个数都只会被筛一次,因此线性筛法是线性的
当 i%primes[j]!=0时,说明此时遍历到的 primes[j]不是 i的质因子,那么 primes[j]一定小于 i的最小质因子,所以 primes[j]*i的最小质因子就是 primes[j];
当有 i%primes[j]==0时,说明 i的最小质因子是 primes[j],因此 primes[j]*i的最小质因子也就应该是prime[j]。
之后接着用 st[primes[j+1]*i]=true去筛合数时,就不是用最小质因子去更新了,因为 i有最小质因子 primes[j],此时的 primes[j+1]不是 primes[j+1]*i的最小质因子,此时就应该退出循环,避免之后重复进行筛选。
O ( n ) O(n) O ( n )
1 2 3 4 5 6 7 8 9 10 11 12 13 bool composite[N];int prime[N],cnt;void getPrime (int n) for (int i=2 ;i<=n;++i){ if (composite[i]==false ){ prime[cnt++]=i; } for (int j=0 ;prime[j]<=n/i;++j){ composite[prime[j]*i]=true ; if (i%prime[j]==0 )break ; } } }
约数(因数)Divisor(Factor)
定义:若整数 n n n d d d d d d n n n d d d n n n n n n d d d d ∣ n d|n d ∣ n
在算数基本定理中,若正整数 N N N N = p 1 c 1 p 2 c 2 ⋯ p m c m N=p_{1}^{c_{1}} p_{2}^{c_{2}} \cdots p_{m}^{c_{m}} N = p 1 c 1 p 2 c 2 ⋯ p m c m c i c_i c i p i p_i p i p 1 < p 2 < ⋯ < p m p_{1}<p_{2}<\cdots<p_{m} p 1 < p 2 < ⋯ < p m N N N
{ p 1 b 1 p 2 b 2 ⋯ p m b m } , 其中 0 ≤ b i ≤ c i \left\{p_{1}^{b_{1}} p_{2}^{b_{2}} \cdots p_{m}^{b_{m}}\right\}, \text { 其中 } 0 \leq b_{i} \leq c_{i}
{ p 1 b 1 p 2 b 2 ⋯ p m b m } , 其中 0 ≤ b i ≤ c i
N N N
( c 1 + 1 ) ∗ ( c 2 + 1 ) ∗ ⋯ ∗ ( c m + 1 ) = ∏ i = 1 m ( c i + 1 ) \left(c_{1}+1\right) *\left(c_{2}+1\right) * \cdots *\left(c_{m}+1\right)=\prod_{i=1}^{m}\left(c_{i}+1\right)
( c 1 + 1 ) ∗ ( c 2 + 1 ) ∗ ⋯ ∗ ( c m + 1 ) = i = 1 ∏ m ( c i + 1 )
N N N
( 1 + p 1 + p 1 2 + ⋯ + p 1 c 1 ) ∗ ⋯ ∗ ( 1 + p m + p m 2 + ⋯ + p m c m ) = ∏ i = 1 m ( ∑ j = 0 c i ( p i ) j ) \left(1+p_{1}+p_{1}^{2}+\cdots+p_{1}^{c_{1}}\right) * \cdots *\left(1+p_{m}+p_{m}^{2}+\cdots+p_{m}^{c_{m}}\right)=\prod_{i=1}^{m}\left(\sum_{j=0}^{c_{i}}\left(p_{i}\right)^{j}\right)
( 1 + p 1 + p 1 2 + ⋯ + p 1 c 1 ) ∗ ⋯ ∗ ( 1 + p m + p m 2 + ⋯ + p m c m ) = i = 1 ∏ m ( j = 0 ∑ c i ( p i ) j )
求 N N N
若 d ≥ N d \geq \sqrt{N} d ≥ N N N N N / d ≤ N N / d \leq \sqrt{N} N / d ≤ N N N N
换言之,约数总是成对出现的(除了对于完全平方数,N \sqrt{N} N
因此,只需要扫描 d = 1 ∼ N d=1 \sim \sqrt{N} d = 1 ∼ N d d d N N N N / d N/d N / d N N N
推论:一个整数 N N N 2 N 2\sqrt{N} 2 N
O ( N ) O(\sqrt{N}) O ( N )
1 2 3 4 5 6 7 8 9 10 11 12 vector<int > getFactor (int n) { vector<int > factor; for (int i=1 ;i<=n/i;++i){ if (n%i==0 ){ factor.push_back (i); if (i!=n/i)factor.push_back (n/i); } } sort (factor.begin (),factor.end ()); return factor; }
求 N N N
1 2 3 4 5 6 7 8 9 10 11 12 13 14 unordered_map<int ,int > prime; void getPrimeFactor (int n) for (int i=2 ;i<=n/i;++i){ while (n%i==0 ){ ++prime[i]; n/=i; } } if (n>1 ) ++prime[n]; } long long countFactor=1 ;for (auto it:prime){ countFactor=countFactor*(it.second+1 )%mod; }
求 N N N
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 unordered_map<int ,int > prime; void getPrimeFactor (int n) for (int i=2 ;i<=n/i;++i){ while (n%i==0 ){ ++prime[i]; n/=i; } } if (n>1 ) ++prime[n]; } for (auto it:prime){ long long p=it.first, index=it.second; long long sum=1 ; while (index--){ sum=(sum*p+1 )%mod; } res=res*sum%mod; }
最大公约数
欧几里得算法 (辗转相除法)
g c d ( a , b ) = g c d ( b , a m o d b ) gcd(a,b)=gcd(b,a\mod b) g c d ( a , b ) = g c d ( b , a mod b ) O ( l o g n ) O(logn) O ( l o g n )
1 2 3 int gcd (int a,int b) return b?gcd (b,a%b):a; }
1 2 3 4 5 6 7 8 int gcd (int a,int b) while (b){ int r=a%b; a=b; b=r; } return a; }
欧拉函数
定义和性质
互质:∀ a , b ∈ N , 若 gcd ( a , b ) = 1 , 则称 a , b 互质 \forall a, b \in \mathbb{N} \text {, 若 } \operatorname{gcd}(a, b)=1, \text { 则称 } a, b \text { 互质 } ∀ a , b ∈ N , 若 gcd ( a , b ) = 1 , 则称 a , b 互质
欧拉函数: 1 ∼ N 中与 N 互质的数的个数被称为欧拉函数, 记为 φ ( N ) 1 \sim N \text { 中与 } N \text { 互质的数的个数被称为欧拉函数, 记为 } \varphi(N) 1 ∼ N 中与 N 互质的数的个数被称为欧拉函数 , 记为 φ ( N )
求欧拉函数
1 2 3 4 5 6 7 8 9 10 11 int phi (int n) int cnt=n; for (int i=2 ;i<=n/i;++i){ if (n%i==0 ){ cnt=cnt/i*(i-1 ); while (n%i==0 ) n/=i; } } if (n>1 ) cnt=cnt/n*(n-1 ); return cnt; }
筛法求欧拉函数
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 int prime[N],cnt;bool iscomposite[N];int e[N];void getEulers (int n) e[1 ]=1 ; for (int i=2 ;i<=n;++i){ if (iscomposite[i]==false ){ prime[cnt++]=i; e[i]=i-1 ; } for (int j=0 ;prime[j]<=n/i;++j){ int p=prime[j]; iscomposite[p*i]=true ; if (i%p==0 ){ e[p*i]=p*e[i]; break ; }else { e[p*i]=e[p]*e[i]; } } } }
欧拉定理
若 gcd ( a , m ) = 1 \operatorname{gcd}(a, m)=1 gcd ( a , m ) = 1 a φ ( m ) ≡ 1 ( m o d m ) a^{\varphi(m)} \equiv 1\ (\bmod m) a φ ( m ) ≡ 1 ( mod m )
扩展欧拉定理
a b ≡ { a b m o d φ ( m ) , gcd ( a , m ) = 1 , a b , gcd ( a , m ) ≠ 1 , b < φ ( m ) , ( m o d m ) a b m o d φ ( m ) + φ ( m ) , gcd ( a , m ) ≠ 1 , b ≥ φ ( m ) . a^{b} \equiv \begin{cases}a^{b\;\bmod\; \varphi(m)}, & \operatorname{gcd}(a, m)=1, \\ a^{b}, & \operatorname{gcd}(a, m) \neq 1, b<\varphi(m), \quad(\bmod m) \\ a^{b\;\bmod \;\varphi(m)+\varphi(m)}, & \operatorname{gcd}(a, m) \neq 1, b \geq \varphi(m) .\end{cases}
a b ≡ ⎩ ⎨ ⎧ a b mod φ ( m ) , a b , a b mod φ ( m ) + φ ( m ) , gcd ( a , m ) = 1 , gcd ( a , m ) = 1 , b < φ ( m ) , ( mod m ) gcd ( a , m ) = 1 , b ≥ φ ( m ) .
费马小定理
p p p 若 gcd ( a , p ) = 1 \operatorname{gcd}(a, p)=1 gcd ( a , p ) = 1 a p − 1 ≡ 1 ( m o d p ) a^{p-1} \equiv 1\ (\bmod p) a p − 1 ≡ 1 ( mod p )
∀ a ∈ Z \forall a \in \mathbb{Z} ∀ a ∈ Z a p ≡ a ( m o d p ) a^{p} \equiv a \ (\bmod p) a p ≡ a ( mod p )
b ≡ { a b m o d φ ( p ) , gcd ( a , p ) = 1 , a b , gcd ( a , p ) ≠ 1 , b < φ ( p ) ( m o d p ) a b m o d φ ( p ) + φ ( p ) , gcd ( a , p ) ≠ 1 , b ≥ φ ( p ) φ ( p ) = p − 1 ^{b} \equiv \begin{cases}a^{b\;\bmod\;\varphi(p)}, & \operatorname{gcd}(a, p)=1, \\ a^{b}, & \operatorname{gcd}(a, p) \neq 1, b<\varphi(p) \quad(\bmod p) \\ a^{b\;\bmod \;\varphi(p)+\varphi(p)}, & \operatorname{gcd}(a, p) \neq 1, b \geq \varphi(p) \end{cases}
\quad\varphi(p)=p-1
b ≡ ⎩ ⎨ ⎧ a b mod φ ( p ) , a b , a b mod φ ( p ) + φ ( p ) , gcd ( a , p ) = 1 , gcd ( a , p ) = 1 , b < φ ( p ) ( mod p ) gcd ( a , p ) = 1 , b ≥ φ ( p ) φ ( p ) = p − 1
快速幂
Θ ( log n ) \Theta(\log n) Θ ( log n )
1 2 3 4 5 6 7 8 9 10 11 using LL=long long ;LL binpow (LL a,LL n,LL p) { a%=p; LL res=1 ; while (n){ if (n&1 )res=res*a%p; a=a*a%p; n>>=1 ; } return res; }
裴蜀定理
设 a , b a,b a , b x , y x,y x , y a x + b y = gcd ( a , b ) ax+by=\gcd (a,b) a x + b y = g cd( a , b )
扩展欧几里得算法 EXGCD
算法原理
求解 a x + b y = gcd ( a , b ) ax+by=\gcd (a,b) a x + b y = g cd( a , b )
由欧几里得定理可知:gcd ( a , b ) = gcd ( b , a m o d b ) \gcd (a,b)=\gcd(b,a\mod b) g cd( a , b ) = g cd( b , a mod b )
设 a x 1 + b y 1 = gcd ( a , b ) = gcd ( b , a m o d b ) = b x 2 + ( a m o d b ) y 2 ax_1+by_1=\gcd (a,b) =\gcd (b,a\mod b)=bx_2+(a\mod b)y_2 a x 1 + b y 1 = g cd( a , b ) = g cd( b , a mod b ) = b x 2 + ( a mod b ) y 2
a m o d b = a − ( ⌊ a b ⌋ × b ) ⇒ a \mod b=a-(\lfloor \frac ab\rfloor \times b) \Rightarrow a mod b = a − (⌊ b a ⌋ × b ) ⇒
a x 1 + b y 1 = b x 2 + ( a − ⌊ a b ⌋ × b ) y 2 = a y 2 + b ( x 2 − ⌊ a b ⌋ y 2 ) ax_1+by_1=bx_2+(a-\lfloor \frac ab\rfloor \times b)y_2=ay_2+b(x_2-\lfloor \frac ab \rfloor y_2) a x 1 + b y 1 = b x 2 + ( a − ⌊ b a ⌋ × b ) y 2 = a y 2 + b ( x 2 − ⌊ b a ⌋ y 2 )
故 x 1 = y 2 , y 1 = x 2 − ⌊ a b ⌋ y 2 x_1=y_2\ ,\ y_1=x_2-\lfloor \frac ab \rfloor y_2 x 1 = y 2 , y 1 = x 2 − ⌊ b a ⌋ y 2
递归写法
1 2 3 4 5 6 7 8 9 10 int exgcd (int a,int b,int &x1,int &y1) if (b==0 ){ x1=1 ,y1=0 ; return a; } int x2,y2; int d=exgcd (b,a%b,x2,y2); x1=y2,y1=x2-(a/b)*y2; return d; }
矩阵解释
gcd ( a , b ) = gcd ( b , a m o d b ) \gcd(a,b)=\gcd(b,a\bmod b) g cd( a , b ) = g cd( b , a mod b )
[ b a m o d b ] = [ 0 1 1 − ⌊ a b ⌋ ] [ a b ] \begin{bmatrix}b\\a\bmod b\end{bmatrix}=
\begin{bmatrix}0&1\\1&-\lfloor \frac ab \rfloor\end{bmatrix}
\begin{bmatrix}a\\b\end{bmatrix}
[ b a mod b ] = [ 0 1 1 − ⌊ b a ⌋ ] [ a b ]
定义变换:
[ a b ] ↦ [ 0 1 1 − ⌊ a b ⌋ ] [ a b ] = [ b a m o d b ] \begin{bmatrix}a\\b\end{bmatrix}
\mapsto
\begin{bmatrix}0&1\\1&-\lfloor \frac ab \rfloor\end{bmatrix}
\begin{bmatrix}a\\b\end{bmatrix}
=\begin{bmatrix}b\\a\bmod b\end{bmatrix}
[ a b ] ↦ [ 0 1 1 − ⌊ b a ⌋ ] [ a b ] = [ b a mod b ]
欧几里得算法即不停应用该变换
( [ 0 1 1 − ⌊ a b ⌋ ] ⋯ [ 0 1 1 − ⌊ a b ⌋ ] ) [ a b ] = [ gcd ( a , b ) 0 ] \left(
\begin{bmatrix}0&1\\1&-\lfloor \frac ab \rfloor\end{bmatrix}
\cdots
\begin{bmatrix}0&1\\1&-\lfloor \frac ab \rfloor\end{bmatrix}
\right)
\begin{bmatrix}a\\b\end{bmatrix}
=
\begin{bmatrix}\gcd(a,b)\\0\end{bmatrix}
( [ 0 1 1 − ⌊ b a ⌋ ] ⋯ [ 0 1 1 − ⌊ b a ⌋ ] ) [ a b ] = [ g cd( a , b ) 0 ]
[ x 1 x 2 x 3 x 4 ] [ a b ] = [ gcd ( a , b ) 0 ] \begin{bmatrix}x_1&x_2\\x_3&x_4\end{bmatrix}
\begin{bmatrix}a\\b\end{bmatrix}
=
\begin{bmatrix}\gcd(a,b)\\0\end{bmatrix}
[ x 1 x 3 x 2 x 4 ] [ a b ] = [ g cd( a , b ) 0 ]
则有 a x 1 + b x 2 = gcd ( a , b ) ax_1+bx_2=\gcd(a,b) a x 1 + b x 2 = g cd( a , b )
初始化:
[ x 1 x 2 x 3 x 4 ] = [ 1 0 0 1 ] \begin{bmatrix}x_1&x_2\\x_3&x_4\end{bmatrix}
=
\begin{bmatrix}1&0\\0&1\end{bmatrix}
[ x 1 x 3 x 2 x 4 ] = [ 1 0 0 1 ]
迭代:
[ a b ] ↦ [ 0 1 1 − ⌊ a b ⌋ ] [ a b ] = [ b a m o d b ] \begin{bmatrix}a\\b\end{bmatrix}
\mapsto
\begin{bmatrix}0&1\\1&-\lfloor \frac ab \rfloor\end{bmatrix}
\begin{bmatrix}a\\b\end{bmatrix}
=\begin{bmatrix}b\\a\bmod b\end{bmatrix}
[ a b ] ↦ [ 0 1 1 − ⌊ b a ⌋ ] [ a b ] = [ b a mod b ]
[ x 1 x 2 x 3 x 4 ] ↦ [ 0 1 1 − ⌊ a b ⌋ ] [ x 1 x 2 x 3 x 4 ] = [ x 3 x 4 x 1 − ⌊ a b ⌋ x 3 x 2 − ⌊ a b ⌋ x 4 ] \begin{bmatrix}x_1&x_2\\x_3&x_4\end{bmatrix}
\mapsto
\begin{bmatrix}0&1\\1&-\lfloor \frac ab \rfloor\end{bmatrix}
\begin{bmatrix}x_1&x_2\\x_3&x_4\end{bmatrix}
=\begin{bmatrix}x_3&x_4\\x_1-\lfloor \frac ab \rfloor x_3&x_2-\lfloor \frac ab \rfloor x_4\end{bmatrix}
[ x 1 x 3 x 2 x 4 ] ↦ [ 0 1 1 − ⌊ b a ⌋ ] [ x 1 x 3 x 2 x 4 ] = [ x 3 x 1 − ⌊ b a ⌋ x 3 x 4 x 2 − ⌊ b a ⌋ x 4 ]
1 2 3 4 5 6 7 8 9 10 11 int exgcd (int a, int b, int &x, int &y) int x1=1 ,x2=0 ,x3=0 ,x4=1 ; while (b){ int c=a/b,tx1=x1,tx2=x2; x1=x3,x2=x4,x3=tx1-c*x3,x4=tx2-c*x4; int r=a%b; a=b,b=r; } x=x1,y=x2; return a; }
1 2 3 4 5 6 7 8 9 int exgcd (int a, int b, int &x, int &y) int x1=1 ,x2=0 ,x3=0 ,x4=1 ; while (b){ int c=a/b; tie (x1,x2,x3,x4,a,b)=make_tuple (x3,x4,x1-c*x3,x2-c*x4,b,a%b); } x=x1,y=x2; return a; }
求解 a x + b y = c ax+by=c a x + b y = c
a x + b y = c ax+by=c a x + b y = c gcd ( a , b ) ∣ c \gcd(a,b)|c g cd( a , b ) ∣ c
先求得 a x 0 + b y 0 = gcd ( a , b ) = d ax_0+by_0=\gcd (a,b)=d a x 0 + b y 0 = g cd( a , b ) = d x 0 , y 0 x_0,y_0 x 0 , y 0
则有特解 x ′ = x 0 c d , y ′ = y 0 c d x'=x_0\frac cd\;,y'=y_0\frac cd x ′ = x 0 d c , y ′ = y 0 d c
故通解为 x = x 0 c d + k b d , y = y 0 c d − k a d x=x_0\frac cd +k\frac bd,y=y_0\frac cd -k\frac ad x = x 0 d c + k d b , y = y 0 d c − k d a
1 2 3 int d=exgcd (a,b,x,y);if (c%d==0 ) cout<<x*1LL *c/d<<endl;else cout<<"impossible" <<endl;
求线性同余方程 a x ≡ c ( m o d b ) ax\equiv c\;(\bmod\;b) a x ≡ c ( mod b )
a x ≡ c ( m o d b ) ⇔ a x = ( − y ) × b + c ⇔ a x + b y = c ax\equiv c\;(\bmod\;b) \Leftrightarrow\; ax=(-y)\times b+c\;\Leftrightarrow\; ax+by=c a x ≡ c ( mod b ) ⇔ a x = ( − y ) × b + c ⇔ a x + b y = c
有解当且仅当 gcd ( a , b ) ∣ c \gcd(a,b)|c g cd( a , b ) ∣ c c = 1 c=1 c = 1 a a a b b b x x x a a a
1 2 3 int d=exgcd (a,b,x,y);if (c%d==0 ) cout<<x*1LL *c/d<<endl;else cout<<"impossible" <<endl;
逆元
如果一个线性同余方程 a x ≡ 1 ( m o d m ) ax\equiv 1\;(\bmod m) a x ≡ 1 ( mod m ) x x x a m o d m a\bmod m a mod m a − 1 a^{-1} a − 1
a a a a , m a,m a , m gcd ( a , m ) = 1 \gcd(a,m)=1 g cd( a , m ) = 1 a a − 1 ≡ 1 ( m o d m ) , b b − 1 ≡ 1 ( m o d m ) ⇒ a b a − 1 b − 1 ≡ 1 ( m o d m ) , ( a b ) − 1 = a − 1 b − 1 aa^{-1}\equiv1\;(\bmod m)\;,\;bb^{-1}\equiv1\;(\bmod m)\Rightarrow aba^{-1}b^{-1} \equiv 1\;(\bmod m)\;,\;(ab)^{-1}=a^{-1}b^{-1} a a − 1 ≡ 1 ( mod m ) , b b − 1 ≡ 1 ( mod m ) ⇒ ab a − 1 b − 1 ≡ 1 ( mod m ) , ( ab ) − 1 = a − 1 b − 1
扩展欧几里得法求逆元
1 2 3 4 5 6 7 8 9 10 11 12 13 int exgcd (int a,int b,int &x,int &y) if (b==0 ){ x=1 ,y=0 ; return a; } int d=exgcd (b,a%b,y,x); y-=a/b*x; return d; } int x,y;int d=exgcd (a,m,x,y);if (d==1 ) cout<<((LL)x%p+p)%p<<endl;else cout<<"impossible" ;
快速幂法求逆元(模m必须为质数)
若 m m m a m ≡ a ( m o d m ) a^{m}\equiv a\;(\bmod m) a m ≡ a ( mod m )
因为 a x ≡ 1 ( m o d m ) ax\equiv 1\;(\bmod m) a x ≡ 1 ( mod m ) a 2 x ≡ a ≡ a m ( m o d m ) a^2x\equiv a\equiv a^m\;(\bmod m) a 2 x ≡ a ≡ a m ( mod m )
a , m a,m a , m x = a − 1 ≡ a m − 2 ( m o d m ) x=a^{-1}\equiv a^{m-2}\;(\bmod m) x = a − 1 ≡ a m − 2 ( mod m )
1 2 3 4 5 6 7 8 9 10 11 12 13 LL binpow (int a,int n,int p) { a%=p; LL res=1 ; while (n){ if (n&1 )res=res*a%p; n>>=1 ; a=a*1LL *a%p; } return res; } if (a%m) cout<<binpow (a,m-2 ,m)%<<endl;else cout<<"impossible" <<endl;
中国剩余定理CRT
求解如下形式的一元线性同余方程组:
{ x ≡ a 1 ( m o d m 1 ) x ≡ a 2 ( m o d m 2 ) ⋮ x ≡ a k ( m o d m k ) \begin{cases} x\equiv a_1\;(\bmod m_1)\\x\equiv a_2\;(\bmod m_2)\\ \;\;\;\;\;\;\;\;\;\;\;\vdots \\x\equiv a_k\;(\bmod m_k)\end{cases} ⎩ ⎨ ⎧ x ≡ a 1 ( mod m 1 ) x ≡ a 2 ( mod m 2 ) ⋮ x ≡ a k ( mod m k )
其中 n 1 , n 2 , ⋯ , n k n_1,n_2,\cdots,n_k n 1 , n 2 , ⋯ , n k
算法流程:
计算所有模数的积 n = n 1 × n 2 × n 3 × ⋯ × n k n=n_1\times n_2\times n_3\times\cdots\times n_k n = n 1 × n 2 × n 3 × ⋯ × n k
对于第 i i i
计算 m i = n n i m_i=\frac n{n_i} m i = n i n
计算 m i m_i m i n i n_i n i m i − 1 m_i^{-1} m i − 1
计算 c i = m i m i − 1 c_i=m_im_i^{-1} c i = m i m i − 1 n i n_i n i
方程组的唯一解为:x = ∑ i = 1 k a i c i ( m o d n ) x=\sum_{i=1}^{k}a_ic_i\;(\bmod n) x = ∑ i = 1 k a i c i ( mod n )
通解为:x + k m ( k ∈ Z ) x+km\;(k\in\Z) x + km ( k ∈ Z )
模数不互质的情况
两个方程
{ x ≡ a 1 ( m o d m 1 ) x ≡ a 2 ( m o d m 2 ) \begin{cases} x\equiv a_1\;(\bmod m_1)\\x\equiv a_2\;(\bmod m_2)\end{cases} { x ≡ a 1 ( mod m 1 ) x ≡ a 2 ( mod m 2 )
转为不定方程 x = m 1 k 1 + a 1 = m 2 k 2 + a 2 x=m_1k_1+a_1=m_2k_2+a_2 x = m 1 k 1 + a 1 = m 2 k 2 + a 2 k 1 , k 2 k_1,k_2 k 1 , k 2
则有 m 1 k 1 − m 2 k 2 = a 2 − a 1 m_1k_1-m_2k_2=a_2-a_1 m 1 k 1 − m 2 k 2 = a 2 − a 1
由裴蜀定理,若 gcd ( m 1 , m 2 ) ∤ a 2 − a 1 \gcd(m_1,m_2)\nmid a_2-a_1 g cd( m 1 , m 2 ) ∤ a 2 − a 1
若 gcd ( m 1 , m 2 ) ∣ a 2 − a 1 \gcd(m_1,m_2)\mid a_2-a_1 g cd( m 1 , m 2 ) ∣ a 2 − a 1 ( k 1 , k 2 ) (k_1,k_2) ( k 1 , k 2 )
则原方程解为 x ≡ b ( m o d M ) x\equiv b\;(\bmod M) x ≡ b ( mod M ) b = m 1 k 1 + a 1 , M = lcm ( m 1 , m 2 ) b=m_1k_1+a_1\;,\;M=\text{lcm} (m_1,m_2) b = m 1 k 1 + a 1 , M = lcm ( m 1 , m 2 )
欧几里得算法求解 m 1 k 01 + m 2 k 02 = a 2 − a 1 m_1k_{01}+m_2k_{02}=a_2-a_1 m 1 k 01 + m 2 k 02 = a 2 − a 1
d = exgcd ( m 1 , m 2 , k 01 , k 02 ) d=\text{exgcd}(m_1,m_2,k_{01},k_{02}) d = exgcd ( m 1 , m 2 , k 01 , k 02 ) k 1 ′ = a 2 − a 1 d k 01 , k 2 ′ = a 2 − a 1 d k 02 k_1'=\frac {a_2-a_1}{d} k_{01},k_2'=\frac {a_2-a_1}{d} k_{02} k 1 ′ = d a 2 − a 1 k 01 , k 2 ′ = d a 2 − a 1 k 02
则有通解
k 1 = k ′ + k m 2 d = a 2 − a 1 d k 01 + k m 2 d k_1=k'+k\frac {m_2}{d}=\frac {a_2-a_1}{d} k_{01}+k\frac{m_2}{d} k 1 = k ′ + k d m 2 = d a 2 − a 1 k 01 + k d m 2
k 2 = − ( k 2 ′ − k m 1 d ) = − a 2 − a 1 d k 02 + k m 1 d k_2=-(k_2'-k\frac{m_1}{d})=-\frac {a_2-a_1}{d} k_{02}+k\frac{m_1}{d} k 2 = − ( k 2 ′ − k d m 1 ) = − d a 2 − a 1 k 02 + k d m 1
其中 k ∈ Z k\in \Z k ∈ Z
为了防止计算过程中出现溢出,需要在通解 k 1 k_1 k 1 k 1 ∗ k_1^* k 1 ∗ k 01 k_{01} k 01
C++中求 x = x 0 + k d x=x_0+kd x = x 0 + k d
( x % d + d ) % d (x\%d+d)\%d ( x % d + d ) % d
k 1 ∗ = ( k 1 % m 2 d + m 2 d ) + m 2 d k_1^*=(k_1\% \frac {m_2}{d}+\frac{m_2}{d})+\frac{m_2}{d} k 1 ∗ = ( k 1 % d m 2 + d m 2 ) + d m 2
k 1 = k 1 ∗ + k m 2 d k_1=k_1^*+k\frac {m_2}{d} k 1 = k 1 ∗ + k d m 2
将求出的 k 1 ∗ k_1^{*} k 1 ∗
begin{align*}x&=m_{1} k_{1} + a_{1} \\&= m_{1} k_{1}^{*} + m_{1} k \frac{m_{2}}{d} + a_{1} \\&= k \frac{m_{1} m_{2}}{d} + (a_{1} + m_{1} k_{1}^{*})\end{align*}
记 a = a 1 + m 1 k 1 ∗ , m = m 1 m 2 d = lcm ( m 1 , m 2 ) a=a_1+m_1k_1^*\;,\;m=\frac{m_1m_2}{d}=\text{lcm}(m_1,m_2) a = a 1 + m 1 k 1 ∗ , m = d m 1 m 2 = lcm ( m 1 , m 2 )
则原来的两个方程可以表示为:
x = k m + a x=km+a x = km + a x ≡ a ( m o d m ) x\equiv a\;(\bmod m) x ≡ a ( mod m )
多个方程
用上面的方法两两合并即可。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 usign LL=long long ; int n; cin>>n;LL a1,m1; cin>>m1>>a1; bool flag=true ;while (--n){ LL a2,m2; cin>>m2>>a2; LL k1,k2; LL d=exgcd (m1,m2,k1,k2); if ((a2-a1)%d==0 ){ k1*=(a2-a1)/d; LL mod=m2/d; k1=(k1%mod+mod)%mod; a1+=m1*k1; m1*=mod; }else { flag=false ; break ; } } if (flag) cout<<a1%m1<<endl;else cout<<-1 <<endl;
高斯消元
算法步骤:
找到当前列绝对值最大的一行
将该行与未确定阶梯型的顶行交换
对该行进行行变换使得非零首元素变为1
进行行变换使得下面所有行的当前列变成0
从下往上依次求解每个未知量
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 int gauss () int r,c; for (r=0 ,c=0 ;c<n;++c){ int t=r; for (int i=r;i<n;++i){ if (abs (a[i][c])>abs (a[t][c])){ t=i; } } if (abs (a[t][c])<eps){ continue ; } for (int i=c;i<=n;++i) swap (a[r][i],a[t][i]); for (int i=n;i>=c;--i) a[r][i]/=a[r][c]; for (int i=r+1 ;i<n;++i){ if (abs (a[i][c])>eps){ for (int j=n;j>=c;--j){ a[i][j]-=a[i][c]*a[r][j]; } } } ++r; } if (r<n){ for (int i=r;i<n;++i){ if (abs (a[i][n])>eps) return 2 ; } return 1 ; } for (int i=n-1 ;i>=0 ;--i){ for (int j=i+1 ;j<n;++j){ a[i][n]-=a[j][n]*a[i][j]; } } return 0 ; }
组合数
C n m = n ! m ! ( n − m ) ! C_n^m=\frac {n!}{m!(n-m)!} C n m = m ! ( n − m )! n !
C n m = C n n − m C_n^m=C_n^{n-m} C n m = C n n − m
C n m = C n − 1 m − 1 + C n − 1 m C_n^m=C_{n-1}^{m-1}+C_{n-1}^m C n m = C n − 1 m − 1 + C n − 1 m
C n 0 + C n 1 + C n 2 + ⋯ + C n n = 2 n C_n^0+C_n^1+C_n^2+\cdots+C_n^n=2^n C n 0 + C n 1 + C n 2 + ⋯ + C n n = 2 n
递推法 O ( n 2 ) O(n^2) O ( n 2 )
C n m = C n − 1 m − 1 + C n − 1 m C_n^m=C_{n-1}^{m-1}+C_{n-1}^m C n m = C n − 1 m − 1 + C n − 1 m
1 2 3 4 5 6 7 8 9 10 11 void init () for (int i=0 ;i<N;++i){ for (int j=0 ;j<=i;++j){ if (j==0 ){ c[i][j]=1 ; }else { c[i][j]=(c[i-1 ][j-1 ]+c[i-1 ][j])%mod; } } } }
预处理阶乘
用快速幂求逆元
C n m = n ! m ! ( n − m ) ! = n ! ( m ! ) − 1 ( n − m ) − 1 C_n^m=\frac {n!}{m!(n-m)!}=n!(m!)^{-1}(n-m)^{-1} C n m = m ! ( n − m )! n ! = n ! ( m ! ) − 1 ( n − m ) − 1
预处理 n ! , ( m ! ) − 1 , ( n − m ) − 1 n!\;,\;(m!)^{-1}\;,\;(n-m)^{-1} n ! , ( m ! ) − 1 , ( n − m ) − 1
O ( N l o g N ) O(NlogN) O ( Nl o g N )
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 int binpow (int a,int n,int p) long long res=1 ; while (n){ if (n&1 )res=res*a%mod; n>>=1 ; a=1LL *a*a%mod; } return res; } void factorial () fact[0 ]=infact[0 ]=1 ; for (int i=1 ;i<N;++i){ fact[i]=1LL *fact[i-1 ]*i%mod; infact[i]=1LL *infact[i-1 ]*binpow (i,mod-2 ,mod)%mod; } } int C (int n,int m) return 1LL *fact[n]*infact[m]%mod*infact[n-m]%mod; }
Lucas 定理
C n m ≡ C n / p m / p C n m o d p m m o d p ( m o d p ) C_n^m \equiv C_{n/p}^{m/p}C_{n\;\bmod\;p}^{m\;\bmod\;p}\;(\bmod\;p) C n m ≡ C n / p m / p C n mod p m mod p ( mod p ) 当问题规模很大,而模数是一个不大的质数的时候,就不能简单地通过递推求解来得到答案,需要用到 Lucas 定理,p p p 1 0 5 10^5 1 0 5 p p p
O ( f ( p ) + g ( n ) log n ) O(f(p)+g(n)\log n) O ( f ( p ) + g ( n ) log n ) f ( n ) f(n) f ( n ) g ( n ) g(n) g ( n ) C n m = n ! ( n − m ) ! m ! = n ( n − 1 ) ( n − 2 ) ⋯ ( n − m + 1 ) ( n − m ) ⋯ 1 ( n − m ) ( n − m − 1 ) ⋯ 1 × m ! = n ( n − 1 ) ( n − 2 ) ⋯ ( n − m + 1 ) m ! C_{n}^{m}=\frac{n!}{(n-m) ! m !}=\frac{n (n-1) (n-2) \cdots (n-m+1) (n-m) \cdots 1}{(n-m) (n-m-1) \cdots 1 \times m !}=\frac{n (n-1) (n-2) \cdots(n-m+1)}{m !} C n m = ( n − m )! m ! n ! = ( n − m ) ( n − m − 1 ) ⋯ 1 × m ! n ( n − 1 ) ( n − 2 ) ⋯ ( n − m + 1 ) ( n − m ) ⋯ 1 = m ! n ( n − 1 ) ( n − 2 ) ⋯ ( n − m + 1 )
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 int binpow (int a,int n,int p) long long res=1 ; while (n){ if (n&1 )res=res*a%p; n>>=1 ; a=1LL *a*a%p; } return res; } int C (int a,int b,int p) if (a<b)return 0 ; long long res=1 ; for (int i=1 ,j=a;i<=b;++i,--j){ res=res*j%p*binpow (i,p-2 ,p)%p; } return res; } int Lucas (long long a,long long b,int p) if (a<p&&b<p) return C (a,b,p); return 1LL *C (a%p,b%p,p)*Lucas (a/p,b/p,p)%p; }
卡特兰数
H 0 H_0 H 0 H 1 H_1 H 1 H 2 H_2 H 2 H 3 H_3 H 3 H 4 H_4 H 4 H 5 H_5 H 5 H 6 H_6 H 6
1
1
2
5
14
42
132
H n = 4 n − 2 n + 1 H n − 1 , H 0 = 1 H_n=\frac {4n-2}{n+1}H_{n-1}\;,\;H_0=1 H n = n + 1 4 n − 2 H n − 1 , H 0 = 1
H n = C 2 n n − C 2 n n − 1 = C 2 n n n + 1 = ( 2 n ) ! n ! n ! = ( 2 n ) ( 2 n − 1 ) ⋯ ( n + 1 ) n ! H_n=C_{2n}^n-C_{2n}^{n-1}=\frac {C_{2n}^n}{n+1}=\frac{(2n)!}{n!n!}=\frac{(2n)(2n-1)\cdots(n+1)}{n!} H n = C 2 n n − C 2 n n − 1 = n + 1 C 2 n n = n ! n ! ( 2 n )! = n ! ( 2 n ) ( 2 n − 1 ) ⋯ ( n + 1 )
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 int binpow (int a,int n,int p) long long res=1 ; while (n){ if (n&1 )res=res*a%mod; n>>=1 ; a=1LL *a*a%mod; } return res; } int catalan (int n) long long res=1 ; for (int i=n+1 ;i<=2 *n;++i)res=res*i%mod; for (int i=1 ;i<=n;++i)res=res*binpow (i,mod-2 ,mod)%mod; res=res*binpow (n+1 ,mod-2 ,mod)%mod; return res; }
路径计数问题
非降路径是指只能向上或向右走的路径
从 ( 0 , 0 ) (0,0) ( 0 , 0 ) ( m , n ) (m,n) ( m , n ) m m m x x x n n n y y y C m + n m C_{m+n}^m C m + n m
P ( m , n ) → P ( m + 1 , n − 1 ) P(m,n)\rightarrow P(m+1,n-1)
P ( m , n ) → P ( m + 1 , n − 1 )
不穿过 y = x y=x y = x C m + n n − C m + n n − 1 C_{m+n}^{n}-C_{m+n}^{n-1} C m + n n − C m + n n − 1 m = n m=n m = n H n = C 2 n n − C 2 n n − 1 H_n=C_{2n}^n-C_{2n}^{n-1} H n = C 2 n n − C 2 n n − 1
容斥原理
∣ ⋃ i = 1 n S i ∣ = ∑ m = 1 n ( − 1 ) m − 1 ∑ a i < a i + 1 ∣ ⋂ i = 1 m S a i ∣ \left|\bigcup_{i=1}^{n} S_{i}\right|=\sum_{m=1}^{n}(-1)^{m-1} \sum_{a_{i}<a_{i+1}}\left|\bigcap_{i=1}^{m} S_{a_{i}}\right|
∣ ∣ i = 1 ⋃ n S i ∣ ∣ = m = 1 ∑ n ( − 1 ) m − 1 a i < a i + 1 ∑ ∣ ∣ i = 1 ⋂ m S a i ∣ ∣
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 int res=0 ;for (int i=1 ;i<(1 <<m);++i){ int t=1 ; int s=0 ; for (int j=0 ;j<m;++j){ if (i>>j&1 ){ if (1LL *t*p[j]>n){ t=-1 ; break ; } ++s; t*=p[j]; } } if (t!=-1 ){ if (s&1 )res+=n/t; else res-=n/t; } } cout<<res<<endl;
动态规划
背包DP
题意概要:有 N N N V V V v i v_i v i w i w_i w i
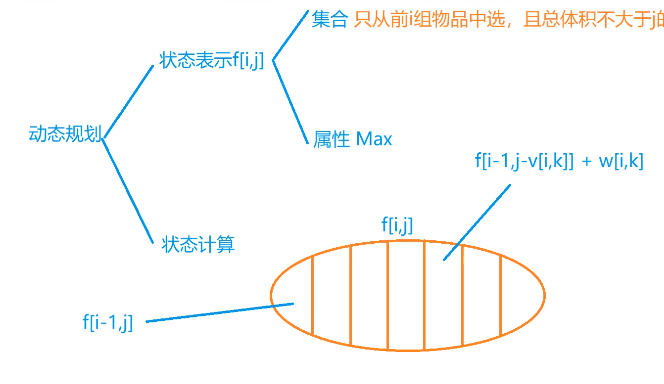
0-1背包
已知条件有第 i i i v i v_i v i w i w_i w i V V V f i , j f_{i,j} f i , j i i i j j j
考虑转移 :初始状态 f 0 , j = 0 f_{0,j}=0 f 0 , j = 0 i − 1 i-1 i − 1 i i i
选择不加入第 i i i f i , j = f i − 1 , j f_{i,j}=f_{i-1,j} f i , j = f i − 1 , j
选择加入第 i i i v i v_i v i w i w_i w i f i , j = f i − 1 , j − v i + w i f_{i,j}=f_{i-1,j-v_i}+w_i f i , j = f i − 1 , j − v i + w i
故背包的最大价值为 f i , j = max ( f i − 1 , j , f i − 1 , j − v i + w i ) f_{i,j}=\max(f_{i-1,j},f_{i-1,j-v_i}+w_i) f i , j = max ( f i − 1 , j , f i − 1 , j − v i + w i )
状态转移方程: f i , j = max ( f i − 1 , j , f i − 1 , j − v i + w i ) f_{i,j}=\max(f_{i-1,j},f_{i-1,j-v_i}+w_i) f i , j = max ( f i − 1 , j , f i − 1 , j − v i + w i )
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 int N,V;int v[M],w[M];int f[M][M];int main () cin>>N>>V; for (int i=1 ;i<=N;++i){ cin>>v[i]>>w[i]; } for (int i=1 ;i<=N;++i){ for (int j=0 ;j<=V;++j){ f[i][j]=f[i-1 ][j]; if (j>=v[i]) f[i][j]=max (f[i-1 ][j],f[i-1 ][j-v[i]]+w[i]); } } cout<<f[N][V]; return 0 ; }
**滚动数组优化:**由于对 f i f_i f i f i − 1 f_{i-1} f i − 1 f j f_j f j j j j
f j = max ( f j , f j − v i + w i ) f_j=\max(f_j,f_{j-v_i}+w_i)
f j = max ( f j , f j − v i + w i )
j j j V V V v i v_i v i 时间复杂度 O ( N V ) O(NV) O ( N V ) O ( V ) O(V) O ( V )
1 2 3 4 5 6 for (int i=1 ;i<=N;++i){ for (int j=V;j>=v[i];j--){ f[j]=max (f[j],f[j-v[i]]+w[i]); } } cout<<f[V];
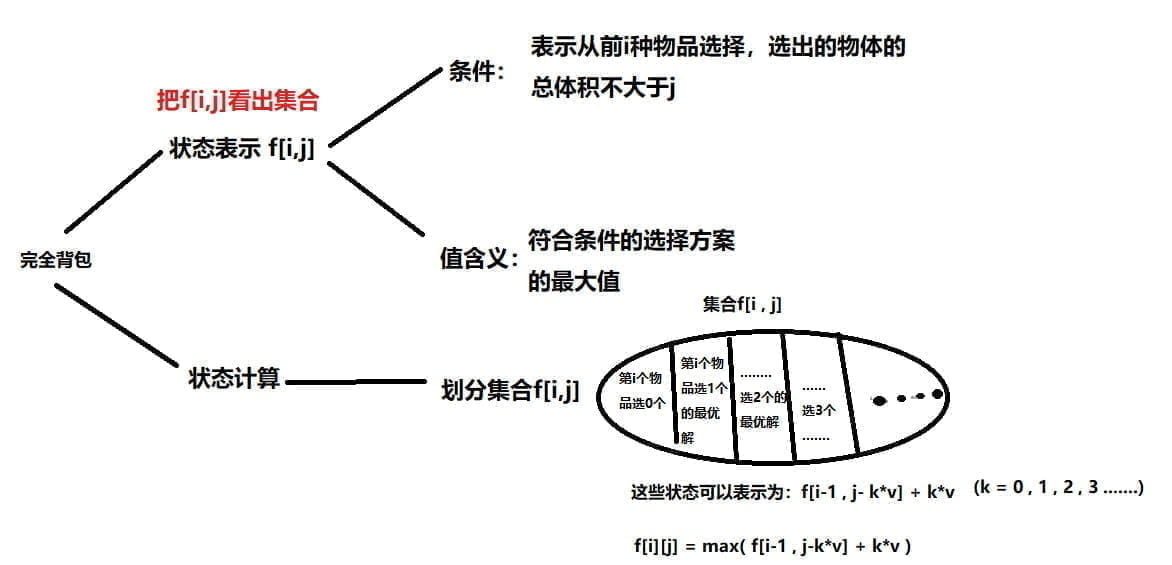
完全背包
完全背包模型与 0-1 背包类似,与 0-1 背包的区别仅在于一个物品可以选取无限次,而非仅能选取一次。
朴素做法 暴力算法
对于第 i i i
共求解 O ( N V ) O(NV) O ( N V ) f i , j f_{i,j} f i , j O ( j / v i ) O(j/v_i) O ( j / v i ) O ( V ∑ i = 1 N V v i ) O(V\sum_{i=1}^N\frac{V}{v_i}) O ( V ∑ i = 1 N v i V )
f i , j = max k = 0 ⌊ j v i ⌋ ( f i − 1 , j − k × v i + w i × k ) = max ( f i − 1 , j , f i − 1 , j − v i + w i , f i − 1 , j − 2 v i + 2 w i , ⋯ , f i − 1 , j − ⌊ j v i ⌋ v i + ⌊ j v i ⌋ w i ) \begin{align*}f_{i, j}&=\max _{k=0}^{\lfloor\frac{j}{v_i}\rfloor}\left(f_{i-1, j-k \times v_{i}}+w_{i} \times k\right)\\
&=\max(f_{i-1,j}\;,\;f_{i-1,j-v_i}+w_i\;,\;f_{i-1,j-2v_i}+2w_i\;,\;\cdots\;,\;f_{i-1,j-\lfloor\frac{j}{v_i}\rfloor v_i}+\lfloor\frac{j}{v_i}\rfloor w_i)\end{align*}
f i , j = k = 0 max ⌊ v i j ⌋ ( f i − 1 , j − k × v i + w i × k ) = max ( f i − 1 , j , f i − 1 , j − v i + w i , f i − 1 , j − 2 v i + 2 w i , ⋯ , f i − 1 , j − ⌊ v i j ⌋ v i + ⌊ v i j ⌋ w i )
优化时间 O ( N V ) O(NV) O ( N V )
f i , j = max ( f i − 1 , j , f i − 1 , j − v i + w i , f i − 1 , j − 2 v i + 2 w i , ⋯ , f i − 1 , j − ⌊ j v i ⌋ v i + ⌊ j v i ⌋ w i ) f i , j − v i = max ( f i − 1 , j − v i , f i − 1 , j − 2 v i + w i , f i − 1 , j − 3 v i + 2 w i , ⋯ , f i − 1 , j − v i − ⌊ j − v i v i ⌋ v i + ⌊ j − v i v i ⌋ w i ) = max ( f i − 1 , j − v i , f i − 1 , j − 2 v i + w i , f i − 1 , j − 3 v i + 2 w i , ⋯ , f i − 1 , j − ⌊ j v i ⌋ v i + ( ⌊ j v i ⌋ − 1 ) w i ) \begin{align*}
f_{i, j}&=\max(f_{i-1,j}\;,\;f_{i-1,j-v_i}+w_i\;,\;f_{i-1,j-2v_i}+2w_i\;,\;\cdots\;,\;f_{i-1,j-\lfloor\frac{j}{v_i}\rfloor v_i}+\lfloor\frac{j}{v_i}\rfloor w_i)\\
f_{i, j-v_i}&=\max(f_{i-1,j-v_i}\;,\;f_{i-1,j-2v_i}+w_i\;,\;f_{i-1,j-3v_i}+2w_i\;,\;\cdots\;,\;f_{i-1,j-v_i-\lfloor\frac{j-v_i}{v_i}\rfloor v_i}+\lfloor\frac{j-v_i}{v_i}\rfloor w_i)\\
&=\max(f_{i-1,j-v_i}\;,\;f_{i-1,j-2v_i}+w_i\;,\;f_{i-1,j-3v_i}+2w_i\;,\;\cdots\;,\;f_{i-1,j-\lfloor\frac{j}{v_i}\rfloor v_i}+(\lfloor\frac{j}{v_i}\rfloor -1)w_i)
\end{align*}
f i , j f i , j − v i = max ( f i − 1 , j , f i − 1 , j − v i + w i , f i − 1 , j − 2 v i + 2 w i , ⋯ , f i − 1 , j − ⌊ v i j ⌋ v i + ⌊ v i j ⌋ w i ) = max ( f i − 1 , j − v i , f i − 1 , j − 2 v i + w i , f i − 1 , j − 3 v i + 2 w i , ⋯ , f i − 1 , j − v i − ⌊ v i j − v i ⌋ v i + ⌊ v i j − v i ⌋ w i ) = max ( f i − 1 , j − v i , f i − 1 , j − 2 v i + w i , f i − 1 , j − 3 v i + 2 w i , ⋯ , f i − 1 , j − ⌊ v i j ⌋ v i + (⌊ v i j ⌋ − 1 ) w i )
则有
f i , j = max k = 0 ⌊ j v i ⌋ ( f i − 1 , j − k × v i + w i × k ) = max ( f i − 1 , j , f i − 1 , j − v i + w i , f i − 1 , j − 2 v i + 2 w i , ⋯ , f i − 1 , j − ⌊ j v i ⌋ v i + ⌊ j v i ⌋ w i ) = max ( f i − 1 , j , max ( f i − 1 , j − v i + w i , f i − 1 , j − 2 v i + 2 w i , ⋯ , f i − 1 , j − ⌊ j v i ⌋ v i + ⌊ j v i ⌋ w i ) ) \begin{align*}
f_{i, j}&=\max _{k=0}^{\lfloor\frac{j}{v_i}\rfloor}\left(f_{i-1, j-k \times v_{i}}+w_{i} \times k\right)\\
&=\max(f_{i-1,j}\;,\;f_{i-1,j-v_i}+w_i\;,\;f_{i-1,j-2v_i}+2w_i\;,\;\cdots\;,\;f_{i-1,j-\lfloor\frac{j}{v_i}\rfloor v_i}+\lfloor\frac{j}{v_i}\rfloor w_i)\\
&=\max(f_{i-1,j}\;,\;\max(f_{i-1,j-v_i}+w_i\;,\;f_{i-1,j-2v_i}+2w_i\;,\;\cdots\;,\;f_{i-1,j-\lfloor\frac{j}{v_i}\rfloor v_i}+\lfloor\frac{j}{v_i}\rfloor w_i))
\end{align*}
f i , j = k = 0 max ⌊ v i j ⌋ ( f i − 1 , j − k × v i + w i × k ) = max ( f i − 1 , j , f i − 1 , j − v i + w i , f i − 1 , j − 2 v i + 2 w i , ⋯ , f i − 1 , j − ⌊ v i j ⌋ v i + ⌊ v i j ⌋ w i ) = max ( f i − 1 , j , max ( f i − 1 , j − v i + w i , f i − 1 , j − 2 v i + 2 w i , ⋯ , f i − 1 , j − ⌊ v i j ⌋ v i + ⌊ v i j ⌋ w i ))
即
f i , j = max ( f i − 1 , j , f i , j − v i + w i ) f_{i,j}=\max(f_{i-1,j}\;,\;f_{i,j-v_i}+w_i)
f i , j = max ( f i − 1 , j , f i , j − v i + w i )
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 int N,V;const int M=1010 ;int v[M],w[M];int f[M][M];int main () cin>>N>>V; for (int i=1 ;i<=N;++i){ cin>>v[i]>>w[i]; } for (int i=1 ;i<=N;++i){ for (int j=0 ;j<=V;++j){ f[i][j]=f[i-1 ][j]; if (j>=v[i]) f[i][j]=max (f[i-1 ][j],f[i][j-v[i]]+w[i]); } } cout<<f[N][V]; return 0 ; }
滚动数组优化空间到一维
f j = max ( f j , f j − v i + w i ) j 从小到大正向枚举 f_{j}=\max(f_{j},f_{j-v_i}+w_i)\\
j\;\text{从小到大正向枚举}
f j = max ( f j , f j − v i + w i ) j 从小到大正向枚举
1 2 3 4 5 6 for (int i=1 ;i<=N;++i){ for (int j=v[i];j<=V;++j){ f[j]=max (f[j],f[j-v[i]]+w[i]); } } cout<<f[V];
多重背包
多重背包也是 0-1 背包的一个变式。与 0-1 背包的区别在于每种物品有 s i s_i s i
朴素做法 O ( V ∑ i = 1 N s i ) O(V\sum_{i=1}^Ns_i) O ( V ∑ i = 1 N s i )
把「每种物品选 s i s_i s i s i s_i s i
这样就转换成了一个 0-1 背包模型。
状态转移方程:
f i , j = max ( f i − 1 , j , f i − 1 , j − v i + w i , f i − 1 , j − 2 v i + 2 w i , ⋯ , f i − 1 , j − s i v i + s i w i ) = max k = 0 s i ( f i − 1 , j − k v i + k w i ) \begin{align*}
f_{i,j}&=\max(f_{i-1,j}\;,\;f_{i-1,j-v_i}+w_i\;,\;f_{i-1,j-2v_i}+2w_i\;,\;\cdots\;,\;f_{i-1,j-s_iv_i}+s_iw_i)\\
&=\max_{k=0}^{s_i}(f_{i-1,j-kv_i}+kw_i)
\end{align*}
f i , j = max ( f i − 1 , j , f i − 1 , j − v i + w i , f i − 1 , j − 2 v i + 2 w i , ⋯ , f i − 1 , j − s i v i + s i w i ) = k = 0 max s i ( f i − 1 , j − k v i + k w i )
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 int N,V;int v[M],w[M],s[M];int f[M][M];int main () cin>>N>>V; for (int i=1 ;i<=N;++i){ cin>>v[i]>>w[i]>>s[i]; } for (int i=1 ;i<=N;++i){ for (int j=0 ;j<=V;++j){ for (int k=0 ;k<=s[i]&&k*v[i]<=j;++k){ f[i][j]=max (f[i][j],f[i-1 ][j-k*v[i]]+k*w[i]); } } } cout<<f[N][V]; return 0 ; }
二进制分组优化
利用二进制的思想, 我们把第 i i i i i i 0 ⋯ s i 0\cdots s_{i} 0 ⋯ s i s i s_{i} s i
方法是:将第 i i i
令这些系数分别为 1 , 2 1 , 2 2 , ⋯ , 2 k − 1 , s i − 2 k + 1 1,2^1,2^{2}, \cdots ,2^{k-1}, s_{i}-2^{k}+1 1 , 2 1 , 2 2 , ⋯ , 2 k − 1 , s i − 2 k + 1 k k k 1 + 2 1 + 2 2 + ⋯ + 2 k − 1 = 2 k − 1 ≤ s i 1+2^1+2^2+\cdots+2^{k-1}=2^{k}-1\leq s_{i} 1 + 2 1 + 2 2 + ⋯ + 2 k − 1 = 2 k − 1 ≤ s i k = ⌊ log 2 ( s i + 1 ) ⌋ k=\lfloor \log_2(s_i+1) \rfloor k = ⌊ log 2 ( s i + 1 )⌋
分成的这几件物品的系数和为 s i s_{i} s i s i s_{i} s i i i i
另外 这种方法也能保证对于 0 … s i 0 \ldots s_{i} 0 … s i 0 … 2 k − 1 0 \ldots 2^{k-1} 0 … 2 k − 1 2 k ⋯ s i 2^{k} \cdots s_{i} 2 k ⋯ s i
这样就将第 i i i O ( log s i ) O(\log{s_i}) O ( log s i ) O ( V ∑ i = 1 N log s i ) O(V\sum_{i=1}^N\log{s_i}) O ( V ∑ i = 1 N log s i )
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 int N,V;int v[M],w[M],idx;int f[MM];int main () cin>>N>>V; for (int i=1 ;i<=N;++i){ int a,b,s; cin>>a>>b>>s; int k=1 ; while (k<s){ v[++idx]=k*a; w[idx]=k*b; s-=k; k*=2 ; } if (s){ v[++idx]=s*a; w[idx]=s*b; } } for (int i=1 ;i<=idx;++i){ for (int j=V;j>=v[i];--j){ f[j]=max (f[j],f[j-v[i]]+w[i]); } } cout<<f[V]; return 0 ; }
分组背包
所谓分组背包,就是将物品分组,每组的物品相互冲突,最多只能选一个物品放进去。
其实是从「在所有物品中选择一件」变成了「从当前组中选择一件」,于是就对每一组进行一次 0-1 背包就可以了。
如何进行存储。用 v i , k , w i , k v_{i,k}\;,\;w_{i,k} v i , k , w i , k i i i k k k s i s_i s i i i i
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 int N,V;int v[M][M],w[M][M],s[M];int f[M];int main () cin>>N>>V; for (int i=1 ;i<=N;++i){ cin>>s[i]; for (int k=1 ;k<=s[i];++k){ cin>>v[i][k]>>w[i][k]; } } for (int i=1 ;i<=N;++i){ for (int j=V;j>=0 ;--j){ for (int k=1 ;k<=s[i];++k){ if (j>=v[i][k]) f[j]=max (f[j],f[j-v[i][k]]+w[i][k]); } } } cout<<f[V]; return 0 ; }
初始化细节
要求恰好装满背包,那么在初始化时除了 F [ 0 ] F[0] F [ 0 ] F [ 1 ⋯ V ] F[1\cdots V] F [ 1 ⋯ V ] − ∞ -\infty − ∞ F [ V ] F[V] F [ V ]
如果并没有要求必须把背包装满, 而是只希望价格尽量大, 初始化时应该将 F [ 0 ] [ 0 ⋯ V ] F[0][0\cdots V] F [ 0 ] [ 0 ⋯ V ]
初始化的 F F F
如果要求背包恰好装满, 那么此时只有容量为 0 的背包可以在什么也不装且价值为 0 的情况下被“恰好装满”,其它容量的背包均没有合法的解,属于未定义的状态,应该被赋值为 − ∞ -\infty − ∞
如果背包并非必须被装满,那么任何容量的背包,都有一个合法解“什么都不装”,这个解的价值为 0 ,所以初始时状态的值也就全部为 0 了。
线性DP
数字三角形
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 #include <iostream> #include <cstring> using namespace std;const int N=510 ;int n;int f[N][N],a[N][N];int main () cin>>n; for (int i=1 ;i<=n;++i){ for (int j=1 ;j<=i;++j){ cin>>a[i][j]; } } memset (f,0xc0 ,sizeof f); f[1 ][1 ]=a[1 ][1 ]; for (int i=2 ;i<=n;++i){ for (int j=1 ;j<=i;++j){ f[i][j]=max (f[i-1 ][j-1 ],f[i-1 ][j])+a[i][j]; } } int res=0xc0c0c0c0 ; for (int i=1 ;i<=n;++i) res=max (res,f[n][i]); cout<<res; return 0 ; }
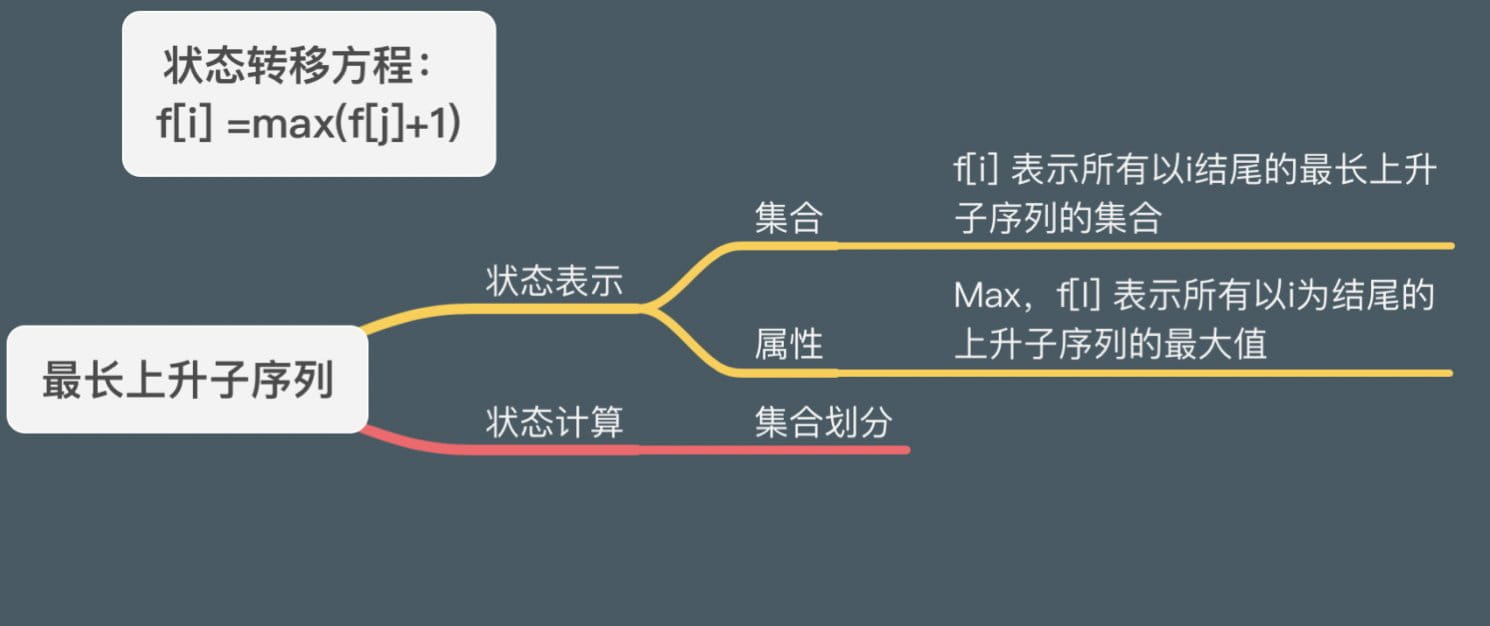
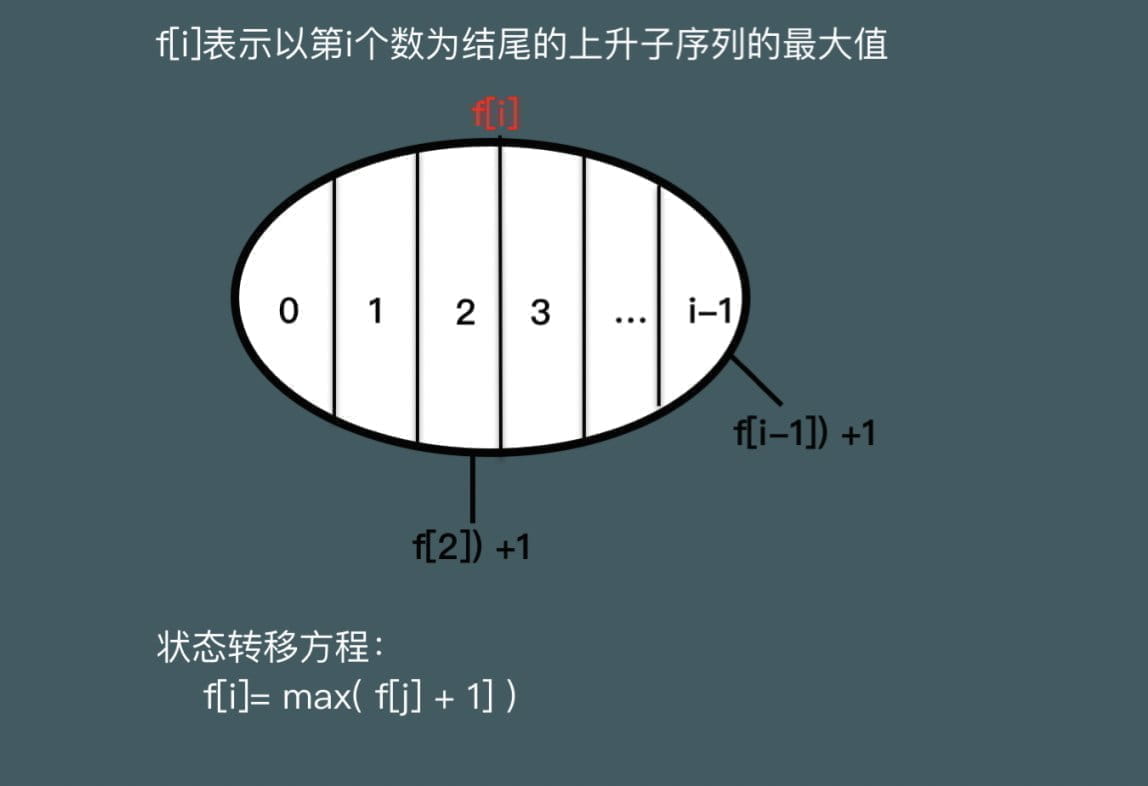
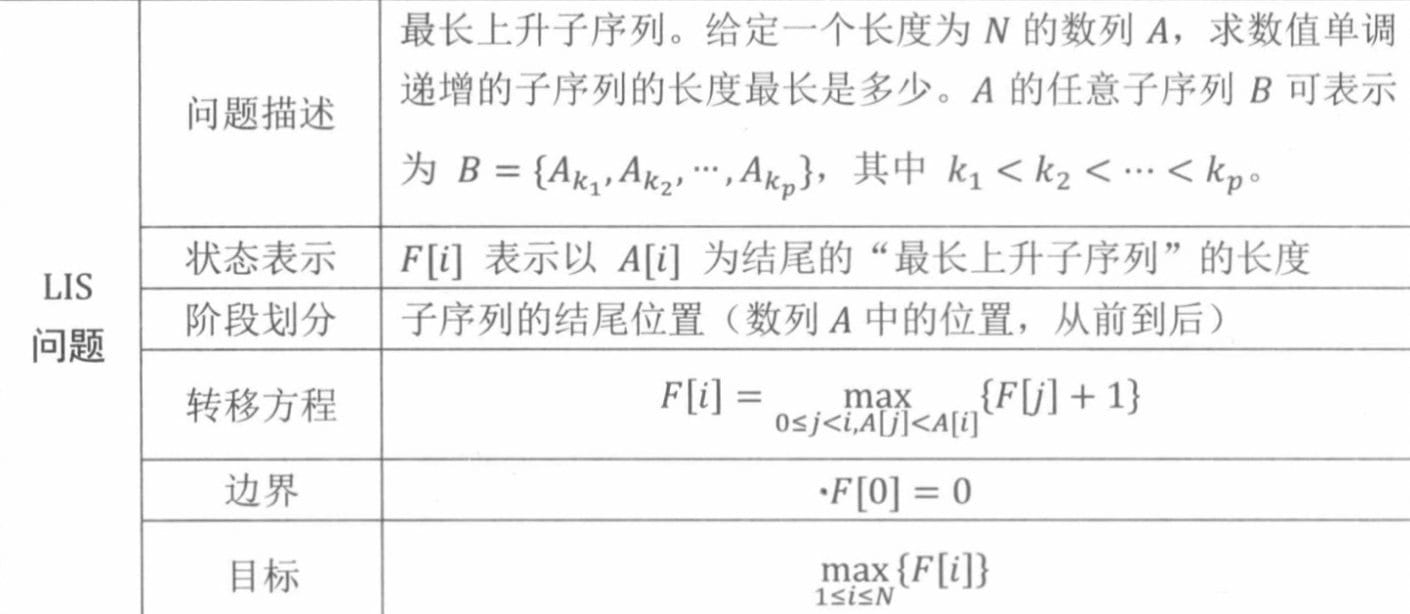
最长上升子序列
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 int n;int f[N],a[N],path[N];int main () cin>>n; for (int i=1 ;i<=n;++i)cin>>a[i]; int t=1 ; for (int i=1 ;i<=n;++i){ for (int j=0 ;j<i;++j){ if (j==0 ||a[j]<a[i]){ if (f[i]<f[j]+1 ){ f[i]=f[j]+1 ; path[i]=j; } } } if (f[i]>f[t]) t=i; } cout<<"Length:" <<f[t]<<endl<<"Path:" ; while (t){ cout<<a[t]<<" " ; t=path[t]; } }
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 int n,a[N],stk[N],tt;int main () cin>>n; for (int i=1 ;i<=n;++i){ cin>>a[i]; int l=1 ,r=tt+1 ; while (l<r) int mid=l+r>>1 ; if (stk[mid]>=a[i]){ r=mid; }else { l=mid+1 ; } } if (r==tt+1 )stk[++tt]=a[i]; else stk[r]=a[i]; } cout<<tt<<endl; }
最短编辑距离
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 char a[N],b[N];int f[N][N];int main () int n,m; cin>>n>>a+1 >>m>>b+1 ; for (int i=1 ;i<=n;++i)f[i][0 ]=i; for (int j=1 ;j<=m;++j)f[0 ][j]=j; for (int i=1 ;i<=n;++i){ for (int j=1 ;j<=m;++j){ f[i][j]=min (f[i-1 ][j],f[i][j-1 ])+1 ; f[i][j]=min (f[i][j],f[i-1 ][j-1 ]+(a[i]!=b[j])); } } cout<<f[n][m]; }
零散知识点
模 1 e 9 + 7 1e9+7 1 e 9 + 7
1 e 9 + 7 1e9+7 1 e 9 + 7 2 30 2^{30} 2 30 如果原数是 i n t int in t i n t int in t
如果原数是 l o n g l o n g long\;long l o n g l o n g l o n g l o n g long\;long l o n g l o n g
无穷大无穷小
1 2 3 4 5 6 #include <cstring> const int INF=0x3f3f3f3f ;const int nINF=0xc0c0c0c0 ;int a[10 ],b[10 ];memset (a,0x3f ,sizeof a);memset (b,0xc0 ,sizeof b);
取整
> > 1 >>1 >> 1 /2是向0取整
⌈ m n ⌉ = ⌊ m − 1 n ⌋ + 1 \lceil \frac{m}{n} \rceil=\left\lfloor\frac{m-1}{n}\right\rfloor+1 ⌈ n m ⌉ = ⌊ n m − 1 ⌋ + 1 ⌊ m n ⌋ = ⌈ m + 1 n ⌉ − 1 \left\lfloor\frac{m}{n}\right\rfloor=\lceil \frac{m+1}{n} \rceil -1 ⌊ n m ⌋ = ⌈ n m + 1 ⌉ − 1
调和级数
∑ k = 1 n 1 k = ln n + C = O ( log n ) \sum_{k=1}^n\frac{1}{k}=\ln{n}+C=O(\log{n})
k = 1 ∑ n k 1 = ln n + C = O ( log n )
判断奇偶
1 2 3 4 5 if (x & 1 ) { cout << "x是奇数" << endl; } else { cout << "x是偶数" << endl; }
2 n 2^n 2 n 位运算
<< >> 位移运算符优先级小于±*/
数异或0等于自身,异或1…1等取反
将数n的第j位取反:n^(1<<j)
获取数n的第j位 n>>j&1
返回n的最后一位1:lowbit(n) = n & -n
ListNode* 小顶堆
1 2 3 4 5 6 struct cmp { bool operator () (const ListNode* a, const ListNode* b) const return a->val > b->val; } }; priority_queue<ListNode*, vector<ListNode*>, cmp> heap;
遍历转移
1 2 while (k && nums[k - 1 ] >= x) --k;while (t + 1 < nums.size () && nums[t + 1 ] > x) ++t;
去重
1 2 3 sort (a.begin (), a.end ());auto newend = unique (a.begin (), a.end ());a.erase (unique (newend, a.end ());