
C++ 虚函数表
一、概述
为了实现 C++ 的多态,C++ 使用了一种动态绑定的技术。这个技术的核心是虚函数表(下文简称虚表)。本文介绍虚函数表是如何实现动态绑定的。
二、类的虚表
“多态” 的关键在于通过基类指针或引用调用一个虚函数时,编译时不确定到底调用的是基类还是派生类的函数,运行时才确定。这是如何实现的呢?
请看下面的程序,该程序演示了多态类对象存储空间的大小。
1 |
|
在 32 位编译模式下,程序的运行结果是:
8, 12
如果将程序中的 virtual 关键字去掉,输出结果变为:
4, 8
对比发现,有了虚函数以后,对象所占用的存储空间比没有虚函数时多了 4 个字节。实际上,任何有虚函数的类及其派生类的对象都包含这多出来的 4 个字节,这 4 个字节就是实现多态的关键——它位于对象存储空间的最前端,其中存放的是虚函数表的地址。
每一个有虚函数的类(或有虚函数的类的派生类)都有一个虚函数表,该类的任何对象中都放着该虚函数表的指针(可以认为这是由编译器自动添加到构造函数中的指令完成的)。
虚函数表是编译器生成的,程序运行时被载入内存。一个类的虚函数表中列出了该类的全部虚函数地址。例如,在上面的程序中,类 A 对象的存储空间以及虚函数表(假定类 A 还有其他虚函数)如图 1 所示。
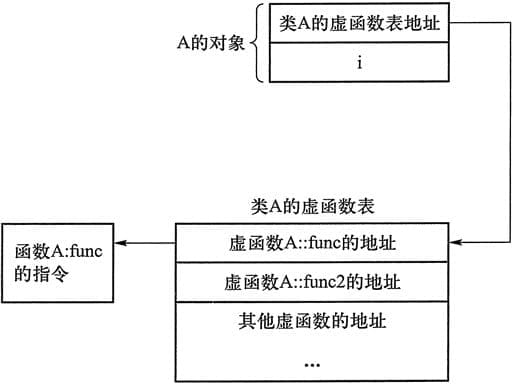
图 1:类 A 对象的存储空间以及虚函数表
类 B 对象的存储空间以及虚函数表(假定类 B 还有其他虚函数)如图 2 所示。

图 2:类 B 对象的存储空间以及虚函数表
多态的函数调用语句被编译成根据基类指针所指向的(或基类引用所引用的)对象中存放的虚函数表的地址,在虚函数表中查找虚函数地址,并调用虚函数的一系列指令。
假设 pa 的类型是 A*,则 pa->func() 这条语句的执行过程如下:
-
取出 pa 指针所指位置的前 4 个字节,即对象所属的类的虚函数表的地址(在 64 位编译模式下,由于指针占 8 个字节,所以要取出 8 个字节)。如果 pa 指向的是类 A 的对象,则这个地址就是类 A 的虚函数表的地址;如果 pa 指向的是类 B 的对象,则这个地址就是类 B 的虚函数表的地址。
-
根据虚函数表的地址找到虚函数表,在其中查找要调用的虚函数的地址。不妨认为虚函数表是以函数名作为索引来查找的,虽然还有更高效的查找方法。
如果 pa 指向的是类 A 的对象,自然就会在类 A 的虚函数表中查出 A::func 的地址;如果 pa 指向的是类 B 的对象,就会在类 B 的虚函数表中查出 B::func 的地址。
类 B 没有自己的 func2 函数,因此在类 B 的虚函数表中保存的是 A::func2 的地址,这样,即便 pa 指向类 B 的对象,pa->func2();这条语句在执行过程中也能在类 B 的虚函数表中找到 A::func2 的地址。
- 根据找到的虚函数的地址调用虚函数。
由以上过程可以看出,只要是通过基类指针或基类引用调用虚函数的语句,就一定是多态的,也一定会执行上面的查表过程,哪怕这个虚函数仅在基类中有,在派生类中没有。
多态机制能够提高程序的开发效率,但是也增加了程序运行时的开销。虚函数表、各个对象中包含的 4 个字节的虚函数表的地址都是空间上的额外开销;而查虚函数表的过程则是时间上的额外开销。
在计算机发展的早期,计算机非常昂贵稀有,运行速度慢,计算机的运算时间和内存是宝贵的,因此人们不惜多花人力编写运行速度更快、更节省内存的程序;如今,计算机的运算时间和内存往往没有人的时间宝贵,运算速度也很快,因此,在用户可以接受的前提下,降低程序运行的效率以提升人员的开发效率就是值得的了。“多态” 的应用就是典型例子。
每个包含了虚函数的类都包含一个虚表。
我们知道,当一个类(A)继承另一个类(B)时,类 A 会继承类 B 的函数的调用权。所以如果一个基类包含了虚函数,那么其继承类也可调用这些虚函数,换句话说,一个类继承了包含虚函数的基类,那么这个类也拥有自己的虚表。
我们来看以下的代码。类 A 包含虚函数 vfunc1,vfunc2,由于类 A 包含虚函数,故类 A 拥有一个虚表。
1 | class A { |
类 A 的虚表如图 1 所示。
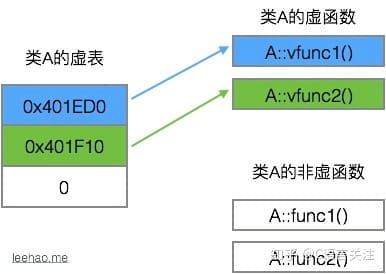
图 1:类 A 的虚表示意图
虚表是一个指针数组,其元素是虚函数的指针,每个元素对应一个虚函数的函数指针。需要指出的是,普通的函数即非虚函数,其调用并不需要经过虚表,所以虚表的元素并不包括普通函数的函数指针。
虚表内的条目,即虚函数指针的赋值发生在编译器的编译阶段,也就是说在代码的编译阶段,虚表就可以构造出来了。
三、虚表指针
虚表是属于类的,而不是属于某个具体的对象,一个类只需要一个虚表即可。同一个类的所有对象都使用同一个虚表。
为了指定对象的虚表,对象内部包含一个虚表的指针,来指向自己所使用的虚表。为了让每个包含虚表的类的对象都拥有一个虚表指针,编译器在类中添加了一个指针,*__vptr,用来指向虚表。这样,当类的对象在创建时便拥有了这个指针,且这个指针的值会自动被设置为指向类的虚表。
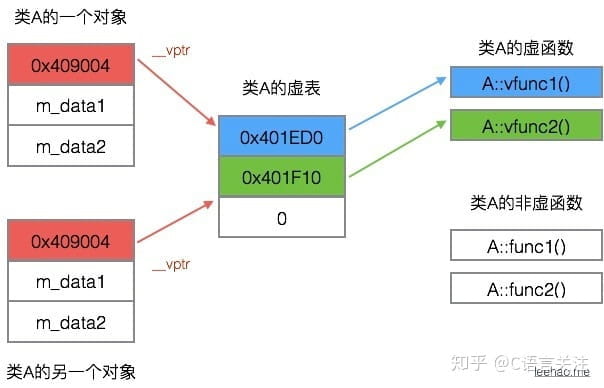
图 2:对象与它的虚表
上面指出,一个继承类的基类如果包含虚函数,那个这个继承类也有拥有自己的虚表,故这个继承类的对象也包含一个虚表指针,用来指向它的虚表。
四、动态绑定
说到这里,大家一定会好奇 C++ 是如何利用虚表和虚表指针来实现动态绑定的。我们先看下面的代码。
1 | class A { |
类 A 是基类,类 B 继承类 A,类 C 又继承类 B。类 A,类 B,类 C,其对象模型如下图 3 所示。
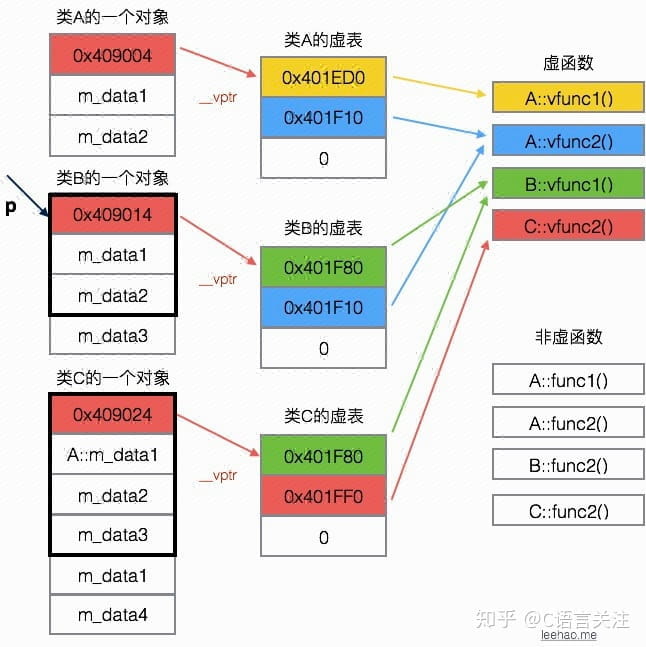
图 3:类 A,类 B,类 C 的对象模型
由于这三个类都有虚函数,故编译器为每个类都创建了一个虚表,即类 A 的虚表(A vtbl),类 B 的虚表(B vtbl),类 C 的虚表(C vtbl)。类 A,类 B,类 C 的对象都拥有一个虚表指针,*__vptr,用来指向自己所属类的虚表。
类 A 包括两个虚函数,故 A vtbl 包含两个指针,分别指向A::vfunc1()和A::vfunc2()。
类 B 继承于类 A,故类 B 可以调用类 A 的函数,但由于类 B 重写了B::vfunc1()函数,故 B vtbl 的两个指针分别指向B::vfunc1()和A::vfunc2()。
类 C 继承于类 B,故类 C 可以调用类 B 的函数,但由于类 C 重写了C::vfunc2()函数,故 C vtbl 的两个指针分别指向B::vfunc1()(指向继承的最近的一个类的函数)和C::vfunc2()。
虽然图 3 看起来有点复杂,但是只要抓住 “对象的虚表指针用来指向自己所属类的虚表,虚表中的指针会指向其继承的最近的一个类的虚函数” 这个特点,便可以快速将这几个类的对象模型在自己的脑海中描绘出来。
非虚函数的调用不用经过虚表,故不需要虚表中的指针指向这些函数。
假设我们定义一个类 B 的对象bObject。由于bObject是类 B 的一个对象,故bObject包含一个虚表指针,指向类 B 的虚表。
1 | int main() |
现在,我们声明一个类 A 的指针 p 来指向对象bObject。虽然p是基类的指针只能指向基类的部分,但是虚表指针亦属于基类部分,所以p可以访问到对象bObject的虚表指针。bObject的虚表指针指向类 B 的虚表,所以p可以访问到 B vtbl。如图 3 所示。
1 | int main() |
当我们使用p来调用vfunc1()函数时,会发生什么现象?
1 | int main() |
程序在执行p->vfunc1()时,会发现p是个指针,且调用的函数是虚函数,接下来便会进行以下的步骤。
首先,根据虚表指针p->__vptr来访问对象bObject对应的虚表。虽然指针p是基类A*类型,但是*__vptr也是基类的一部分,所以可以通过p->__vptr可以访问到对象对应的虚表。
然后,在虚表中查找所调用的函数对应的条目。由于虚表在编译阶段就可以构造出来了,所以可以根据所调用的函数定位到虚表中的对应条目。对于p->vfunc1()的调用,B vtbl 的第一项即是vfunc1对应的条目。
最后,根据虚表中找到的函数指针,调用函数。从图 3 可以看到,B vtbl 的第一项指向B::vfunc1(),所以p->vfunc1()实质会调用B::vfunc1()函数。
如果p指向类 A 的对象,情况又是怎么样?
1 | int main() |
当aObject在创建时,它的虚表指针__vptr已设置为指向 A vtbl,这样p->__vptr就指向 A vtbl。vfunc1在 A vtbl 对应在条目指向了A::vfunc1()函数,所以p->vfunc1()实质会调用A::vfunc1()函数。
可以把以上三个调用函数的步骤用以下表达式来表示:
1 | (*(p->__vptr)[n])(p) |
可以看到,通过使用这些虚函数表,即使使用的是基类的指针来调用函数,也可以达到正确调用运行中实际对象的虚函数。
我们把经过虚表调用虚函数的过程称为动态绑定,其表现出来的现象称为运行时多态。动态绑定区别于传统的函数调用,传统的函数调用我们称之为静态绑定,即函数的调用在编译阶段就可以确定下来了。
那么,什么时候会执行函数的动态绑定?这需要符合以下三个条件。
- 通过指针来调用函数
- 指针 upcast 向上转型(继承类向基类的转换称为 upcast,关于什么是 upcast,可以参考本文的参考资料)
- 调用的是虚函数
如果一个函数调用符合以上三个条件,编译器就会把该函数调用编译成动态绑定,其函数的调用过程走的是上述通过虚表的机制。
五、总结
封装,继承,多态是面向对象设计的三个特征,而多态可以说是面向对象设计的关键。C++ 通过虚函数表,实现了虚函数与对象的动态绑定,从而构建了 C++ 面向对象程序设计的基石。
参考资料
- C++ 虚函数表剖析 - 知乎 (zhihu.com)
- 《C++ Primer》第三版,中文版,潘爱民等译
- http://www.learncpp.com/cpp-tutorial/125-the-virtual-table/
- 侯捷《C++ 最佳编程实践》视频,极客班,2015




